หลักการทำงานของเอซีมอเตอร์
1. ภาพรวมของเอซีมอเตอร์
เอซีมอเตอร์ คือ มอเตอร์ไฟฟ้าที่หมุนโดยใช้พลังงานจากแหล่งจ่ายไฟเอซี มอเตอร์ประเภทนี้สามารถใช้งานง่ายและมีราคาไม่สูง ซึ่งมีการใช้งานกันอย่างแพร่หลายในอุปกรณ์ไฟฟ้าหลากหลายชนิด
1.1 ใช้งานง่ายและต้นทุนต่ำ
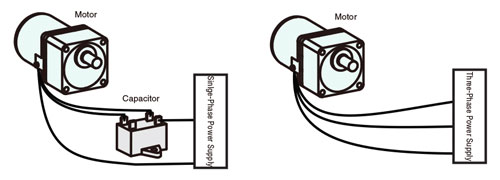
เอซีมอเตอร์ใช้งานง่ายเพียงแค่เชื่อมต่อมอเตอร์เข้ากับแหล่งจ่ายไฟเอซี จึงมีต้นทุนต่ำ สำหรับมอเตอร์ 1 เฟสจะต้องมีการเชื่อมต่อกับตัวคาปาซิเตอร์ระหว่างแหล่งจ่ายไฟและตัวมอเตอร์
1.2 โครงสร้างของเอซีมอเตอร์
โครงสร้างของเอซีมอเตอร์ตามรุปดังต่อไปนี้
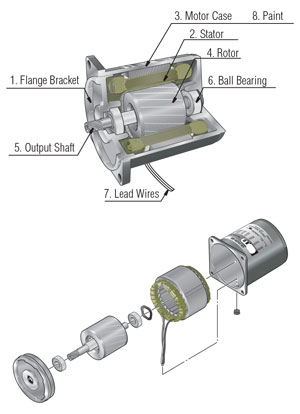
1. ฝาปิดด้านหน้ามอเตอร์ เป็นอลูมิเนียมหล่อขึ้นรูปที่ผ่านการกลึง และนำมาประกอบเข้ากับเคสของมอเตอร์
2. สเตเตอร์ จะประกอบด้วยแกนสเตเตอร์ที่ทำจากแผ่นโลหะแม่เหล็กไฟฟ้า ขดลวดทองแดงถูกเคลือบด้วยโพลีเอสเตอร์และแผ่นฟิล์มฉนวน
3. เคสมอเตอร์ ผลิตจากอลูมิเนียมหล่อขึ้นรูปที่ผ่านการกลึงทางด้านใน
4. โรเตอร์ ผลิตจากแผ่นโลหะแม่เหล็กไฟฟ้าและอลูมิเนียมหล่อขึ้นรูป
5. เพลามอเตอร์ มีให้เลือกทั้งเพลาแบบกลม และ เพลาแบบพิเนียน โลหะที่ใช้ในการผลิตเพลาคือ S45C ประเภทเพลาแบบกลมนั้นเพลาจะถูกปาดเรียบ (ขนาดกำลัง 25 W และมากกว่า) ในขณะที่ประเภทเพลาแบบพิเนียนนั้นเป็นเฟืองที่มีความแม่นยำสูง
6. ลูกปืน
7. สายไฟมอเตอร์ ต้านทานความร้อนด้วยการเคลือบด้วยโพลีเอทิลีน
8. สี เรซิ่นอะคริลิก หรือ เรซิ่นเมลามีนที่ผ่านการอบ
1.3 หลักการทำงานของเอซีมอเตอร์ 1 (Arago’s Disk)
เอซีมอเตอร์จะสร้าง “สนามแม่เหล็ก” และ “กระแสไฟฟ้าเหนี่ยวนำ” ภายในตัวมอเตอร์ด้วยสเตเตอร์และโรเตอร์ซึ่งทำให้เกิดแรงหมุน หลักการทำงานของเอซีมอเตอร์สามารถอธิบายได้ด้วยการใช้ Arago’s Disk
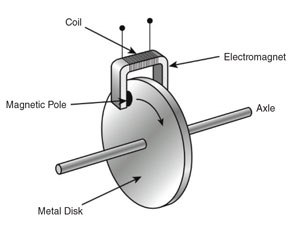
Arago’s disk คือ ปรากฏการณ์เมื่อแม่เหล็กเคลื่อนที่ไปตามพื้นผิวของดิสก์โลหะ ดิสก์จะหมุนตามแม่เหล็ก ขั้นแรกให้เตรียมแผ่นทองแดงกลมที่สามารถหมุนได้อย่างอิสระและแม่เหล็ก วางแผ่นทองแดงกลมไว้ระหว่างขั้วแม่เหล็ก โดยที่แม่เหล็กไม่สัมผัสกับแผ่นทองแดง จากนั้นเลื่อนแม่เหล็กรูปตัวยูไปตามขอบของแผ่นทองแดง แผ่นทองแดงจะเริ่มหมุนตามการเคลื่อนที่ของแม่เหล็ก
หลักการของ Arago’s disk
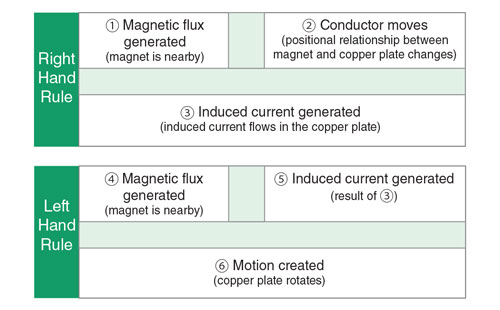
หลักการของ Arago’s Disk สามารถอธิบายได้โดยการใช้ “กฏมือขวาของ Fleming” และ “กฎมือซ้ายของ Fleming”
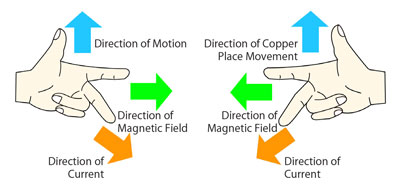
“กฎมือขวาของ Fleming” ระบุทิศทางของกระแสไฟฟ้า (สำหรับเครื่องกำเนิดไฟฟ้า) เมื่อตัวนำเคลื่อนที่ผ่านเส้นแรงของสนามแม่เหล็ก
“กฎมือซ้ายของ Fleming” ระบุทิศทางของแรงเคลื่อนไฟฟ้า (สำหรับมอเตอร์) เมื่อตัวนำเคลื่อนที่ผ่านเส้นแรงของสนามแม่เหล็ก
เเราจะใช้กฎทั้งสองนี้เพื่อแสดงความสัมพันธ์ระหว่างแผ่นทองแดงและแม่เหล็ก โดยใช้กฎมือขวาจากนั้นใช้กฎมือซ้าย
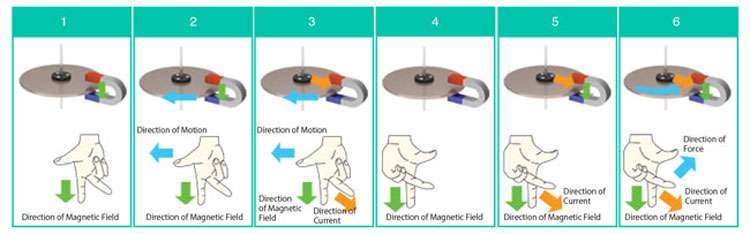
ความเร็วในการหมุนของแผ่นดิสก์ทองแดงจะช้ากว่าแม่เหล็กเล็กน้อย สิ่งนี้ช่วยให้เกิดแรงหมุนที่เกิดจากตัวนำเคลื่อนที่ผ่านสนามแม่เหล็ก
1.4 หลักการทำงานของเอซีมอเตอร์ 2 (การหมุนของสนามแม่เหล็ก)
แทนที่ Arago's Disk ด้วยสเตเตอร์และโรเตอร์
หลักการทำงานของเอซีมอเตอร์ สามารถอธิบายได้โดยการแทนที่ Arago’s Disk ด้วยโครงสร้างภายในของเอซีมอเตอร์ แม่เหล็กไฟฟ้าขั้ว N และขั้ว S เป็นแบบจำลองอย่างง่ายของสเตเตอร์ ขดลวดปิดที่อยู่ตรงกลางเป็นแบบจำลองอย่างง่ายของโรเตอร์ในการนำไฟฟ้า

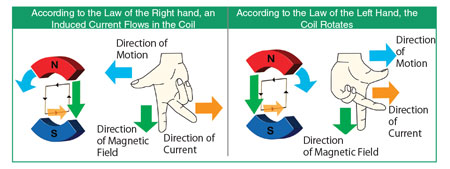
วางขดลวดปิดในสนามแม่เหล็กวงจรปิดและหมุนแม่เหล็กด้านนอกในทิศทางตามเข็มนาฬิกา จากนั้นกระแสไฟฟ้าเหนี่ยวนำจะไหลในขดลวด เมื่อมีการไหลของกระแสไฟฟ้า จะเกิดปฏิกิริยากับสนามแม่เหล็กและสร้างแรงเคลื่อนไฟฟ้าในขดลวด ขดลวดจะเริ่มหมุนไปในทิศทางเดียวกับแม่เหล็ก ในมอเตอร์จริงนั้นโรเตอร์เปรียบเสมือนขดลวดที่ซ้อนทับกันหลายชุดที่เชื่อมต่อเข้าด้วยกัน ดังนั้นจึงสามารถสร้างแรงหมุนได้อย่างสม่ำเสมอ
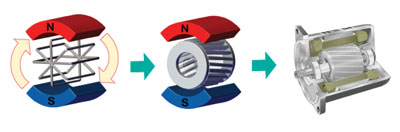
โรเตอร์กรงกระรอกเป็นโรเตอร์ที่มีอลูมิเนียมแนวเอียงหลายชิ้นและแท่งเหล็ก ในโรเตอร์กรงกระรอกกระแสไฟฟ้าจะไหลในส่วนอลูมิเนียม
สนามแม่เหล็กหมุน (แหล่งจ่ายไฟ 1 เฟส, แหล่งจ่ายไฟ 3 เฟส)
เมื่อสเตเตอร์สร้างสนามแม่เหล็กหมุนรอบโรเตอร์ โรเตอร์จะหมุน
ส่วนถัดไปอธิบายว่าเอซีมอเตอร์สร้างสนามแม่เหล็กที่หมุนได้อย่างไร?
แหล่งจ่ายไฟ 1 เฟส - การเปลี่ยนเฟสโดยใช้ตัวเก็บประจุ
ภายในมอเตอร์ 1 เฟส มีขดลวดสองชุดคือขดลวดหลักและขดลวดรอง
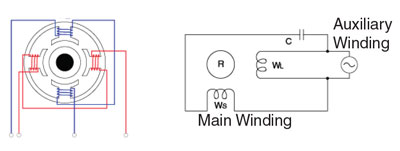
เชื่อมต่อขดลวดหลักเข้ากับแหล่งจ่ายไฟและต่อขดลวดรองเข้ากับแหล่งจ่ายไฟโดยต่อผ่านตัวคาปาซิเตอร์
กระแสไฟฟ้าจากแหล่งจ่ายไฟจะตรงไปยังขดลวดหลัก และในทางกลับกันกระแสไฟฟ้าจะไหลไปขดลวดรองโดยผ่านตัวคาปาซิเตอร์ก่อน
เมื่อใช้งานกับแหล่งจ่ายไฟ 1 เฟส เราใช้ตัวคาปาซิเตอร์ในการเพิ่มเฟสเพื่อสร้างรูปคลื่นให้ใกล้เคียงกับแหล่งจ่ายไฟ 2 เฟสและสร้างสนามแม่เหล็กหมุน
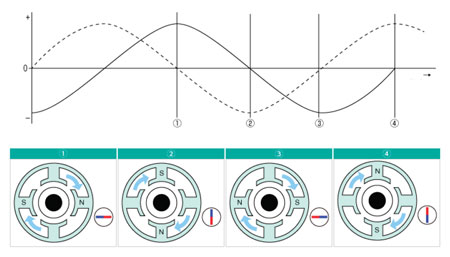
เมื่อเชื่อมต่อแหล่งจ่ายไฟ 1 เฟส ให้ทำซ้ำปรากฏการณ์ ① ถึง ④.
①แรงดันไฟฟ้าถูกนำไปใช้กับขดลวดหลักแรงดันไฟฟ้าจะไม่ใช้กับขดลวดเสริม ขั้ว N และเสา S ถูกสร้างขึ้นในขั้วแม่เหล็กของขดลวดหลัก
②แรงดันไฟฟ้าถูกส่งไปยังขดลวดรอง แรงดันไฟฟ้าจะไม่ถูกส่งไปยังขดลวดหลัก ขั้ว N และขั้ว S ถูกสร้างขึ้นในขั้วแม่เหล็กของขดลวดรอง
③แรงดันไฟฟ้าถูกส่งไปยังขดลวดหลัก แรงดันไฟฟ้าจะไม่ถูกส่งไปยังขดลวดรอง ขั้วแม่เหล็กที่ตรงข้ามกับ ① จะถูกสร้างขึ้นในขั้วแม่เหล็กของขดลวดหลัก
④แรงดันไฟฟ้าถูกส่งไปยังขดลวดรอง แรงดันไฟฟ้าจะไม่ถูกส่งไปยังขดลวดหลัก ขั้วแม่เหล็กที่ตรงข้ามกับ ② จะถูกสร้างขึ้นในขั้วแม่เหล็กของขดลวดรอง
ด้วยวิธีนี้สนามแม่เหล็กที่ถูกสร้างขึ้นในสเตเตอร์จะเปรียบเสมือนการหมุนในทิศทางตามเข็มนาฬิกาา
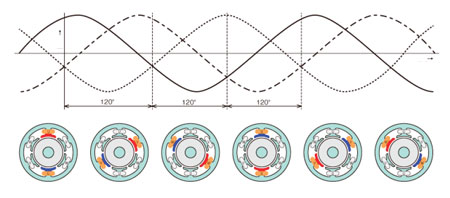
สำหรับแหล่งจ่ายไฟ 3 เฟส – การเลื่อนเฟสของแหล่งจ่ายไฟ
ในมอเตอร์ 1 เฟส มีขดลวดสองชุด คือ ขดลวดหลักและขดลวดรอง แต่มอเตอร์ 3 เฟสประกอบด้วยขดลวดสามชุด สมมุติว่าเฟส U, V, W ทางด้านแหล่งจ่ายไฟ และมีสามเส้นทางที่กระแสไฟฟ้าสามารถไหลผ่านได้ UV, VW, WU เชื่อมต่อขดลวดเหล่านี้เข้ากับแหล่งจ่ายไฟโดยตรง
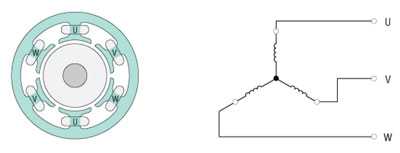
ในสาย U, V, W ของแหล่งจ่ายไฟ 3 เฟส แต่ละเฟสจะเลื่อนต่างกัน 120° และจากเฟสที่เลื่อนต่างกันนี้จึงสร้างสนามแม่เหล็กหมุนในสเตเตอร์ได้โดยไม่จำเป็นต้องต่อตัวคาปาซิเตอร์ ซึ่งต่างจากมอเตอร์ 1 เฟส
1.5 ประเภทของเอซีมอเตอร์
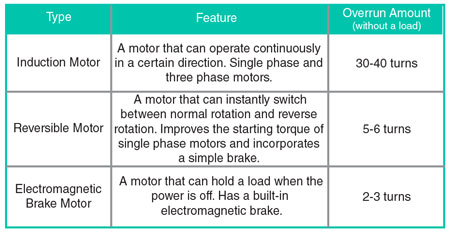
อินดัคชั่นมอเตอร์
อินดัคชั่นมอเตอร์เหมาะกับงานที่หมุนอย่างต่อเนื่องในทิศทางเดียว
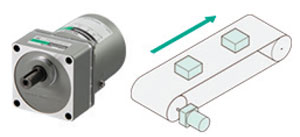
รีเวิรซซิเบิลมอเตอร์
รีเวิรซซิเบิลมอเตอร์เหมาะกับการใช้งานที่มีลักษณะหมุนเปลี่ยนสองทิศทางแบบซ้ำๆ
ด้วยการผสมผสานเบรกแบบธรรมดาและการเพิ่มแรงบิดเริ่มต้นทำให้สามารถเปลี่ยนทิศทางการหมุนของมอเตอร์ได้ทันที
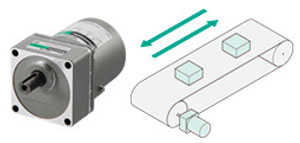
• โครงสร้างของเบรกแบบธรรมดา
รีเวิรซซิเบิลมอเตอร์จะมีกลไกเบรกแบบธรรมดา (เบรกจากแรงเสียดทาน) ที่ด้านหลังของมอเตอร์
กลไกเบรกจะใช้แรงกดไปยังแผ่นเบรกอย่างต่อเนื่องซึ่งจะเสียดสีกับจานเบรก เมื่อมอเตอร์หยุดทำงาน โอเวอร์รันของมอเตอ์จะลดลงอย่างเห็นได้ชัดเมื่อเทียบกับอินดัคชั่นมอเตอร์
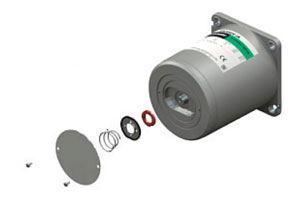
มอเตอร์เบรกแม่เหล็กไฟฟ้า
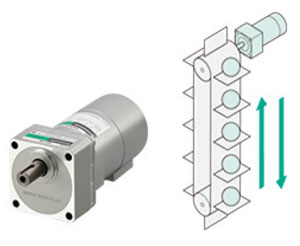
มอเตอร์เบรกแม่เหล็กไฟฟ้าเหมาะอย่างยิ่งสำหรับการใช้งานที่ต้องมีการตรึงภาระไว้ เช่น การทำงานในแนวดิ่ง
ด้วยการผสมผสานเบรกแม่เหล็กไฟฟ้าแบบ Non-Excitation ทำให้สามารถตรึงภาระได้ในขณะที่แหล่งจ่ายไฟถูกปิด
มอเตอร์เบรกแม่เหล็กไฟฟ้ามีให้เลือกทั้งในอินดัคชั่นมอเตอร์และรีเวิรซซิเบิลมอเตอร์
สำหรับประเทศสิงคโปร์: 1800-842-0280
สำหรับประเทศมาเลเซีย: 1800-806-161
สำหรับประเทศไทย: 1800-888-881
สำหรับประเทศอินเดีย: 1800-120-1995
สำหรับประเทศอื่นๆ: +65-6745-7344
เวลาเปิดทำการ
จันทร์ - ศุกร์: 8:30 AM - 5:30 PM
วันเสาร์/วันอาทิตย์/วันหยุดนักขัตฤกษ์: ปิดทำการ
