วิธีการควบคุมความเร็วมอเตอร์ควบคุมความเร็วประเภทต่างๆ
Kazuya SHIRAHATA
บริษัท โอเรียนทัล มอเตอร์ จำกัด นำเสนอมอเตอร์ควบคุมความเร็วที่หลากหลาย แพคเกจมอเตอร์ควบคุมความเร็วของเราประกอบด้วยมอเตอร์ไดรเวอร์ (คอนโทรลเลอร์) และโพเทนชิออมิเตอร์ซึ่งช่วยให้ปรับควบคุมความเร็วได้ง่าย มีกลุ่มผลิตภัณฑ์มอเตอร์ควบคุมความเร็วสามกลุ่ม "ชุดเอซีมอเตอร์ควบคุมความเร็วที่ใช้อินดักชั่นมอเตอร์แบบใช้คาปาซิเตอร์แบบ 1 เฟสที่เป็นที่นิยมมากที่สุด "ดีซีมอเตอร์ชนิดไร้แปรงถ่าน" ขนาดเล็กและมีประสิทธิภาพสูงและ "อินเวอร์เตอร์แบบยูนิต" ที่รวมอินดักชั่นมอเตอร์ 3 เฟสเข้ากับอินเวอร์เตอร์ขนาดเล็ก บทความนี้อธิบายถึงโครงสร้างหลักการควบคุมความเร็วและคุณลักษณะของแต่ละกลุ่มผลิตภัณฑ์และแนะนำผลิตภัณฑ์มาตรฐานของเรา
1. ข้อแนะนำ
มีการใช้มอเตอร์จำนวนมากเพื่อวัตถุประสงค์ทั่วไปในบริเวณโดยรอบของเรา ตั้งแต่อุปกรณ์ที่ใช้ในบ้านไปจนถึงเครื่องมือกลในโรงงานอุตสาหกรรม ปัจจุบันมอเตอร์ไฟฟ้าเป็นแหล่งพลังงานที่จำเป็นและขาดไม่ได้ในหลายอุตสาหกรรม ฟังก์ชันและประสิทธิภาพที่จำเป็นสำหรับมอเตอร์เหล่านี้มีให้เลือกมากมาย เมื่อมุ่งความสนใจไปที่ส่วนควบคุมความเร็วของตลาดเซอร์โวมอเตอร์ และ สเต็ปปิ้งมอเตอร์จะควบคุมความเร็วด้วยพัลส์เทรนในขณะที่อินดักชั่นมอเตอร์และความเร็วในการควบคุมดีซีมอเตอร์ชนิดไร้แปรงถ่านก็สามารถควบคุมความเร็วมอเตอร์ได้ด้วยกระแสไฟดีซีจากภายนอก
โครงสร้างหลักการควบคุมความเร็ว และ คุณสมบัติของกลุ่มผลิตภัณฑ์สามกลุ่มต่อไปนี้ที่สามารถควบคุมความเร็วได้ค่อนข้างง่ายโดยใช้อินพุตแบบแอนะล็อก
- เอซีมอเตอร์ควบคุมความเร็ว & เกียร์มอเตอร์
- ดีซีมอเตอร์ชนิดไร้แปรงถ่าน & เกียร์มอเตอร์
- อินเวอร์เตอร์
2. วิธีการควบคุมความเร็วของมอเตอร์ควบคุมความเร็วต่างๆ
วิธีการควบคุมเอาต์พุตของวงจรควบคุมความเร็วสามารถแบ่งออกเป็นสองกลุ่ม: โดยประมาณได้แก่ การควบคุมเฟสและการควบคุมอินเวอร์เตอร์ซึ่งประกอบเป็นกลุ่มผลิตภัณฑ์ที่แสดงในรูปที่ 1
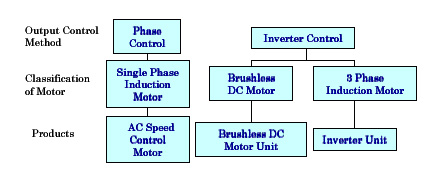
รูปที่ 1 การจำแนกประเภทของมอเตอร์ควบคุมความเร็ว
2.1. เอซีมอเตอร์แบบควบคุมความเร็ว
2.1.1. โครงสร้างของมอเตอร์
ดังแสดงในรูปที่ 2 การสร้างอินดักชั่นมอเตอร์ 1 เฟส และ 3 เฟสประกอบด้วยสเตเตอร์ที่มีขดลวดและโรเตอร์หล่ออลูมิเนียมแข็งรูปทรงตะกร้า โรเตอร์มีต้นทุนต่ำเนื่องจากโครงสร้างเรียบง่ายและไม่ใช้แม่เหล็ก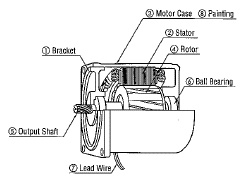
รูปที่ 2 โครงสร้างอินดักชั่นมอเตอร์
เมื่อต้องการควบคุมความเร็วของมอเตอร์อุปกรณ์ Tacho-generator จะถุกใช้ในการตรวจจับความเร็วและติดอยู่กับมอเตอร์ดังแสดงในรูปที่ 3 Tacho-generator ทำจากแม่เหล็กที่เชื่อมต่อโดยตรงกับเพลามอเตอร์ และ ขดลวดสเตเตอร์ที่ตรวจจับขั้วแม่เหล็ก และ สร้างแรงดันไฟฟ้ากระแสสลับที่ 12 ครั้งต่อรอบ เนื่องจากแรงดันไฟฟ้า และ ความถี่นี้เพิ่มขึ้นตามความเร็วในการหมุนที่เพิ่มขึ้นความเร็วในการหมุนของมอเตอร์จึงถูกควบคุมโดยอาศัยสัญญาณนี้
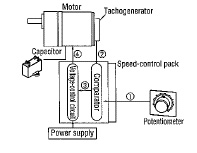
รูปที่ 3 ระบบเอซีมอเตอร์แบบปรับความเร็ว
2.1.2. หลักการควบคุมความเร็ว
ความเร็วในการหมุน N ของอินดักชั่นมอเตอร์สามารถแสดงได้ด้วยภาพ (1) เมื่อแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์เพิ่มขึ้นและลดลง slips จะเปลี่ยนไปจากนั้นความเร็วในการหมุนของ N จะเปลี่ยนไป
N= 120·f ·(1-s)/P · · · · · · · · · · (1)
N: ความเร็วในการหมุน [รอบ/นาที]
F: คลื่นความถี่ 〔Hz〕
P: จำนวนขั้วของมอเตอร์
S: เลื่อน
ในกรณีของอินดักชั่นมอเตอร์ในรูปที่ 4 ช่วงที่คงที่และช่วงที่ไม่เสถียรมีอยู่ในเส้นโค้งความเร็วในการหมุน - แรงบิด เนื่องจากเป็นไปไม่ได้ที่จะทำงานอย่างน่าเชื่อถือในช่วงที่ไม่เสถียรการควบคุมแรงดันไฟฟ้าอย่างง่าย (การควบคุมวงเปิด) จึง จำกัด อยู่ที่การควบคุมความเร็วในช่วงแคบ ๆ เช่น N1 ~ N3 ในรูปที่ 5 เพื่อให้สามารถทำงานได้อย่างน่าเชื่อถือแม้ในช่วงที่ไม่เสถียรดังกล่าวข้างต้นจำเป็นต้องตรวจจับความเร็วในการหมุนของมอเตอร์และใช้กลไกควบคุมแรงดันไฟฟ้า (การควบคุม Closed Loop)
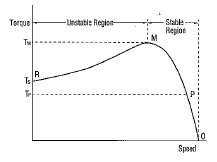
รูปที่ 4 ความเร็วในการหมุน - ลักษณะแรงบิดของอินดักชั่นมอเตอร์
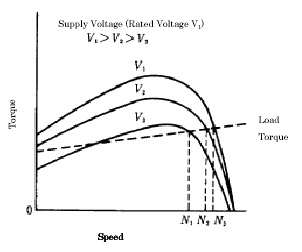
รูปที่ 5 การควบคุมแรงดันไฟฟ้าอย่างง่าย
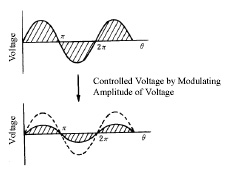
วิธีการควบคุมแรงดันไฟฟ้าที่ใช้ได้ ได้แก่ การควบคุมโดยหม้อแปลงหรือการควบคุมเฟส รูปที่ 6 แสดงเมื่อแรงดันไฟฟ้าถูกควบคุมโดยใช้หม้อแปลง วิธีนี้ใช้กับเอซีมอเตอร์ควบคุมความเร็วได้ไม่ง่ายนัก อีกวิธีหนึ่งคือสามารถปรับแรงดันไฟฟ้ากระแสสลับได้โดยการตั้งเวลาเปิด / ปิดของทุกๆครึ่งรอบของแรงดันไฟฟ้ากระแสสลับ (50 หรือ 60Hz) ที่ใช้กับมอเตอร์โดยใช้ส่วนประกอบสวิตชิ่ง (ไทริสเตอร์หรือไตรแอก) ที่สามารถเปิด และ ปิด เอซีได้โดยตรงแรงดันไฟฟ้าดังแสดงรูปที่ 7 และ รูปที่ 8 การควบคุมความเร็วได้มาจากวิธีการควบคุมเฟสโดยการควบคุม rms ค่าของแรงดันไฟฟ้ากระแสสลับ
รูปที่ 6 การเปลี่ยนแรงดันไฟฟ้าโดย Transformer
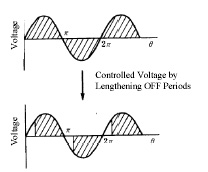
รูปที่ 7 การเปลี่ยน Voltage โดยการควบคุมเฟส
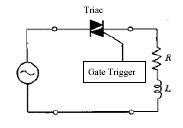
รูปที่ 8 ควบคุมผ่านวงจร Triac
วิธีการควบคุมความเร็วของเอซีนี้สามารถให้การควบคุมความเร็วคงที่โดยการควบคุมเฟสแบบ closed-loop ในช่วงที่ไม่สเถียร
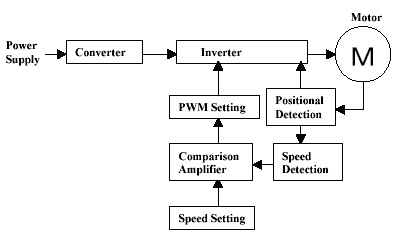
รูปที่ 9 แสดงการกำหนดค่าระบบควบคุมความเร็วสำหรับเอซีมอเตอร์ชนิดควบคุมความเร็วในแผนภาพบล็อก
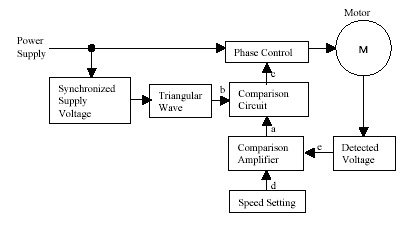
รูปที่ 9 แสดงการกำหนดค่าระบบควบคุมความเร็วสำหรับเอซีมอเตอร์ชนิดควบคุมความเร็วในแผนภาพบล็อก
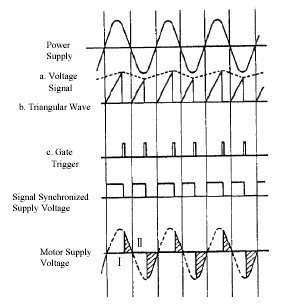
รูปที่ 10 รูปคลื่นสำหรับแต่ละบล็อก
รูปที่ 10 แสดงรูปคลื่นของแต่ละบล็อก ค่าความเร็วที่ตั้งไว้ d และแรงดันไฟฟ้าที่ตรวจพบ e ของความเร็วที่สร้างโดย tacho-generator จะถูกเปรียบเทียบในบล็อกแอมพลิฟายเออร์เปรียบเทียบ จากนั้นกำหนดระดับของสัญญาณ Voltage a
สัญญาณ Voltage a จะต่ำเมื่อค่าความเร็วที่ตรวจพบถึงค่าที่ตั้งไว้ของความเร็วสูงขึ้นและจะสูงขึ้นเมื่อค่าความเร็วที่ตั้งไว้ลดลง เนื่องจากสัญญาณ Trigger ถูกส่งออกที่จุดที่คลื่น Triangular b ตัดกับสัญญาณ Votage a, Timing (มุมเฟส) เมื่อ Triac เปิดอยู่โดยมีระดับสัญญาณ Voltage a ถูกกำหนด เมื่อการตอบสนองช้า Voltageที่จ่ายให้กับมอเตอร์จะต่ำและความเร็วในการหมุนของมอเตอร์จะลดลง ความเร็วในการหมุนที่ลดลงจะถูกป้อนกลับอีกครั้งและการควบคุมจะถูกทำซ้ำเพื่อให้ความแตกต่างระหว่างค่าที่ตรวจพบความเร็วและค่าที่กำหนดความเร็วคงที่เสมอ
รูปที่ 11 แสดงลักษณะของการควบคุมความเร็วดังกล่าวข้างต้น ในรูปที่ 11 จุดการทำงานของมอเตอร์จะดึงลูปของ Q-R-S-T-Q ที่อยู่ตรงกลาง O และความเร็วในการหมุนจะคงอยู่ระหว่าง N1 และ N2 ลูปนี้จะลดลงให้มากที่สุดโดยการเพิ่มความแม่นยำในการตรวจจับความเร็ว
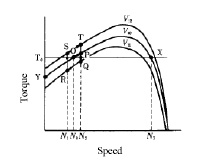
รูปที่ 11 การทำงานของตัวควบคุมความเร็ว
เอซีมอเตอร์ควบคุมความเร็วมีคุณสมบัติดังต่อไปนี้เมื่อใช้การควบคุมเฟสแบบ closed-loop
1) เนื่องจากเอซีมอเตอร์แบบปรับความเร็วถูกควบคุมโดยตรงจึงสามารถกำหนดค่าวงจรควบคุมความเร็วได้เพียงเพราะไม่จำเป็นต้องใช้วงจรปรับให้เรียบทำให้สามารถออกแบบให้มีขนาดกะทัดรัดในราคาที่ต่ำ
2) ในทำนองเดียวกันการออกแบบที่มีอายุการใช้งานยาวนานเป็นไปได้เนื่องจากไม่จำเป็นต้องใช้แบบ Electrolytic คาปาซิเตอร์ซึ่งมีขนาดค่อนข้างใหญ่
3) การสลับจะทำงานเพียงครั้งเดียวในแต่ละครึ่งรอบของแหล่งจ่ายไฟเอซี ซึ่งช่วยให้เสียงรบกวนที่เกิดขึ้นนั้นมีต่ำ
2.1.3. คุณลักษณะ
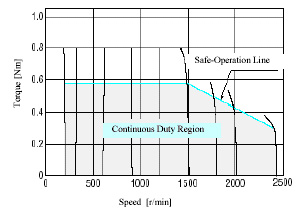
เอซีมอเตอร์แบบควบคุมความเร็วโดยทั่วไปมีลักษณะความเร็ว - แรงบิดในการหมุนดังแสดงในรูปที่ 12
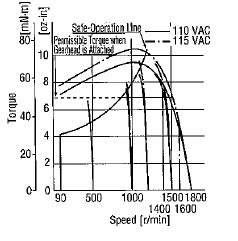
รูปที่ 12 ลักษณะความเร็ว - แรงบิดในการหมุน
"เส้นขอบเขตการทำงานที่ปลอดภัย" รวมอยู่ในรูปที่ 12 "เส้นการทำงานที่ปลอดภัย" แสดงถึงข้อ จำกัด ที่มอเตอร์สามารถทำงานได้อย่างต่อเนื่องโดยไม่เกินอุณหภูมิสูงสุดที่สามารถรองรับได้
2.2. ดีซีมอเตอร์ชนิดไร้แปรงถ่าน
2.2.1. ส่วนประกอบมอเตอร์
สำหรับส่วนประกอบดีซีมอเตอร์ชนิดไร้แปรงขดลวดจะมีสายแบบดาว (สาย Y) ซึ่งมีสามเฟส: U, V และ W และตั้งอยู่ในสเตเตอร์และโรเตอร์ทำจากแม่เหล็กแม่เหล็กในหลาย โครงเสาตามที่แสดงในรูปที่ 14
ภายในสเตเตอร์ IC ฮอลล์สามตัวถูกจัดเรียงเป็นองค์ประกอบแม่เหล็กเพื่อให้ความแตกต่างเฟสของสัญญาณเอาต์พุตจาก IC ฮอลล์แต่ละตัวจะอยู่ห่างกัน 120 องศาสำหรับการหมุนทุกครั้งของโรเตอร์
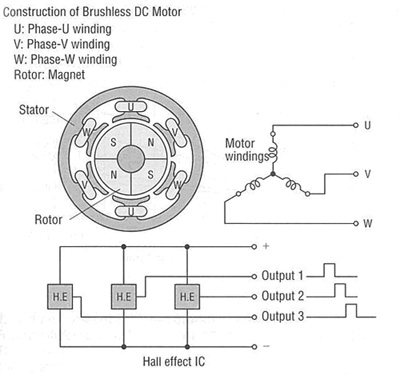
รูปที่ 14 ส่วนประกอบดีซีมอเตอร์ชนิดไร้แปรงถ่าน
2.2.2. หลักการควบคุมความเร็ว
ดังแสดงในรูปที่ 15 ลักษณะความเร็ว - แรงบิดในการหมุนของดีซีมอเตอร์ชนิดไร้แปรงถ่านแสดงลักษณะความลาดเอียงเชิงลบเมื่อไม่ได้ควบคุมความเร็ว ซึ่งคล้ายกับดีซีมอเตอร์แบบแปรงถ่าน
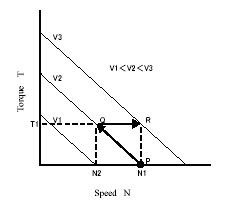
รูปที่ 15 ลักษณะความเร็ว - แรงบิดในการหมุนของดีซีมอเตอร์ชนิดไร้แปรงถ่าน
เมื่อไม่มีการใช้โหลดและตั้งค่าแรงดันไฟฟ้าเข้าที่ V2 ในรูปที่ 15 จุดการทำงานของมอเตอร์จะกลายเป็น P และความเร็วในการหมุนคือ N1 เมื่อใช้ทอร์กโหลด T1 จุดทำงานจะเปลี่ยนเป็น Q และความเร็วในการหมุนจะช้าลงเป็น N2 อย่างไรก็ตามความเร็วในการหมุนจะกลับเป็น N1 หากแรงดันไฟฟ้าเพิ่มขึ้นเป็น V3 ดังนั้นเนื่องจากความเร็วในการหมุนเปลี่ยนไปเมื่อใดก็ตามที่แรงบิดโหลดเปลี่ยนแปลงกลไกควบคุมความเร็วจะต้องเปลี่ยนแรงดันไฟฟ้าขาเข้าเมื่อใดก็ตามที่เห็นการเปลี่ยนแปลงของความเร็วเพื่อรักษาความเร็วคงที่บนสาย PR
การควบคุม Voltage นี้รับรู้โดยอินเวอร์เตอร์ในส่วนเอาต์พุตของวงจรควบคุม (ไดรเวอร์) อินเวอร์เตอร์นี้สร้างเอซี Voltage สามเฟสจากกระแสไฟฟ้าดีซีโดยการเปิดและปิดเหมือนลำดับที่แสดงในรูปที่ 16 (b) โดยใช้องค์ประกอบสวิตซ์ชิ่งหกชิ้น (FET หรือ IGBT) ที่แสดงในรูปที่ 16 (a)
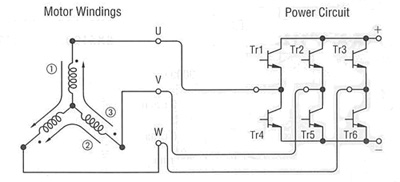
รูปที่ 16 (a) ส่วนเอาต์พุตของวงจรควบคุม (ไดรเวอร์)
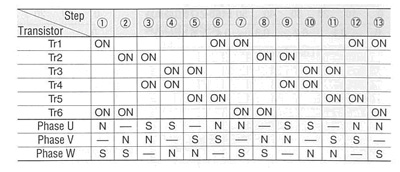
รูปที่ 16 (b) ลำดับการสลับ
องค์ประกอบสวิตชิ่งเชื่อมต่อกับขดลวดมอเตอร์ดังแสดงในรูปที่ 16 (a) และสถานะเปิด / ปิดของสวิตซ์ชิ่งจะกำหนดว่าขดลวดของสเตเตอร์ใดได้รับพลังงานและกระแสจะไหลไปในทิศทางใดนั่นคือ ขดลวดกลายเป็นเสา N หรือเสา S
ในความเป็นจริงตำแหน่งของขั้วแม่เหล็กของโรเตอร์ถูกตรวจพบโดย Hall IC และองค์ประกอบสวิตช์จะถูกเปิด และ ปิด ที่เหมาะสมจะถูกแสดงในรูปที่ 16 (b) ตัวอย่างเช่นในกรณีของขั้นตอนที่ 1 ทรานซิสเตอร์ Tr1 และ Tr6 จะเปิดอยู่และกระแสจะไหลจากเฟส U ไปยังเฟส W ซึ่งในขณะนี้เฟส U จะทำปฎิกิริยากับเมื่อเสา N และเฟส W จะกลายเป็นเสา S และ โรเตอร์จะหมุน 30 องศาเคลื่อนไปยังขั้นตอนที่ 2 การหมุนหนึ่งครั้งของโรเตอร์ทำโดยการทำซ้ำ 12 ครั้ง (ขั้นตอนที่ 1 ~ 12)
รูปที่ 17 แสดงการกำหนดค่าสำหรับการควบคุมความเร็วของชุดดีซีมอเตอร์ชนิดไร้แปรงถ่านในแผนภาพบล็อก
รูปที่ 17 ภาพบล็อกของระบบดีซีมอเตอร์ชนิดไร้แปรงถ่าน
ลำดับการสลับของอินเวอร์เตอร์จะถูกกำหนดโดยสัญญาณจาก Hall IC ส่วนการตรวจจับตำแหน่งของแผนภาพบล็อก และ มอเตอร์จะหมุน
จากนั้นสัญญาณจาก Hall IC จะถูกส่งไปยังวงจรตรวจจับความเร็วเพื่อให้กลายเป็นสัญญาณความเร็วและเปรียบเทียบกับสัญญาณการตั้งค่าความเร็วในบล็อกแอมปลิไฟเออร์เปรียบเทียบซึ่งจะสร้างสัญญาณเบี่ยงเบน ค่าของกระแสอินพุตของมอเตอร์ถูกกำหนดโดยบล็อกการตั้งค่า PWM ตามสัญญาณเบี่ยงเบน
ดีซีมอเตอร์ไฟฟ้าชนิดไร้แปรงถ่านมีคุณสมบัติดังต่อไปนี้
1) เนื่องจากโรเตอร์ใช้แม่เหล็กถาวรและมีการสูญเสียน้อยส่งผลให้มอเตอร์มีประสิทธิภาพสูง
2) ความเฉื่อยของโรเตอร์สามารถลดลง และ ได้รับการตอบสนองความเร็วสูง
3) สามารถลดขนาดมอเตอร์ได้เนื่องจากมีประสิทธิภาพสูง
4) ความผันผวนของความเร็วเมื่อโหลดที่เปลี่ยนแปลงอยู่ในระดับต่ำ
รูปที่ 16 แสดงลำดับการสลับทั่วไป (วิธีการเพิ่มพลังงาน 120 องศา) ระบบดีซีมอเตอร์ชนิดไร้แปรงถ่านที่มีประสิทธิภาพยิ่งขึ้นใช้วิธีการขับเคลื่อนด้วยคลื่นซายน์เวฟ(Sine Wave) โดยการรับข้อมูลตำแหน่งโรเตอร์ความละเอียดสูงจากซอฟต์แวร์จากสัญญาณ Hall IC วิธีนี้ส่งผลให้เป็นวิธีการขับที่มีเสียงรบกวนต่ำเนื่องจากกระแสที่ไหลไปยังมอเตอร์ไม่เปลี่ยนแปลงอย่างรวดเร็ว (2)
รูปที่ 18 การเปรียบเทียบ Voltage นำไปใช้โดย คลื่นซายน์เวฟ และ วิธีการขับเคลื่อนที่ 120 องศา
2.2.3. คุณลักษณะ
ลักษณะความเร็ว - แรงบิดในการหมุนของระบบดีซีมอเตอร์ชนิดไร้แปรงถ่านมีขอบเขตหน้าที่ จำกัด นอกเหนือจากพื้นที่การทำงานต่อเนื่อง
ในกราฟพื้นที่ปฏิบัติงานที่จำกัดจะมีประโยชน์มากเมื่อเริ่มทำงานกับโหลดที่มีแรงเฉื่อยสูง อย่างไรก็ตามเมื่อการทำงานในพื้นที่ จำกัด ทำงานต่อเนื่องเป็นเวลาห้าวินาทีขึ้นไปฟังก์ชันป้องกันการโอเวอร์โหลดของไดรเวอร์จะเปิดใช้งาน และ มอเตอร์จะลดความเร็วลงจนหยุด
2.3. อินเวอร์เตอร์ควบคุมความเร็ว
2.3.1. หลักการควบคุมความเร็ว
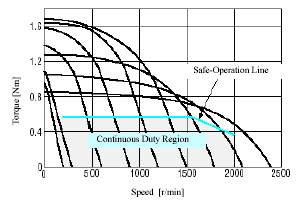
หน่วยอินเวอร์เตอร์ควบคุมความเร็วของอินดักชั่นมอเตอร์มอเตอร์สามเฟสโดยการเปลี่ยนความถี่ f ของแรงดันไฟฟ้าที่ใช้กับมอเตอร์ หน่วยอินเวอร์เตอร์จะเปลี่ยนความถี่ f โดยการเปลี่ยนรอบการเปิด / ปิดขององค์ประกอบสวิตซ์ชิ่งทั้งหกชิ้นและความเร็วในการหมุน (N) ของมอเตอร์จะเปลี่ยนแปลงตามสัดส่วนในสูตร (1)
N= 120·f ·(1-s)/P·· · · · · · · · · (1)
N: ความเร็วในการหมุน [รอบ/นาที]
F: คลื่นความถี่ 〔Hz〕
P: จำนวนขั้วของมอเตอร์
S: เลื่อน
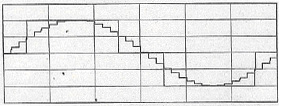
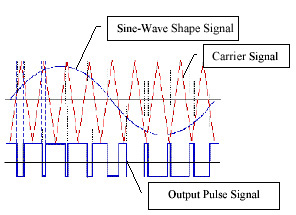
นอกจากนี้เพื่อให้แรงดันไฟฟ้าที่ใช้กับขดลวดมีรูปคลื่นซายน์เวฟ การควบคุมอินเวอร์เตอร์ เปิด / ปิด ดังแสดงในรูปที่ 21 เวลาเปิด / ปิดจะถูกควบคุมเพื่อให้แรงดันไฟฟ้าเฉลี่ยที่ใช้กับมอเตอร์ กลายเป็นรูปคลื่นซายน์เวฟ โดยการเปรียบเทียบคลื่นสามเหลี่ยมที่เรียกว่าสัญญาณพาหะ (Carrier Signal) กับ คลื่นสัญญาณซายน์เวฟ วิธีนี้เรียกว่าการควบคุม PWM
รูปที่ 19 การควบคุมหน้าที่ของการเปิด / ปิด
วิธีการควบคุมความเร็วของหน่วยอินเวอร์เตอร์ของเราแบ่งออกเป็นสองประเภท : การควบคุมแบบวงเปิดที่เพียงแค่เปลี่ยนความเร็ว และ การควบคุมวงปิดที่ช่วยลดการเปลี่ยนแปลงความเร็วด้วยการเปลี่ยนแปลงโหลดของมอเตอร์
1) ควบคุมแบบ Open-loop
รูปที่ 22 แสดงการกำหนดค่าของตัวควบคุมวงเปิดในแผนภาพบล็อก
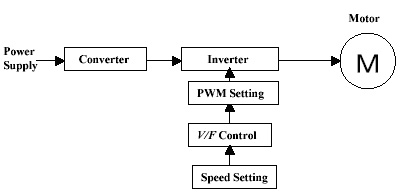
รูปที่ 20 บล๊อก ของการควบคุม Open-Loop
วิธีนี้ใช้เพื่อเปลี่ยน Voltage ขาเข้า และ ความถี่ของมอเตอร์ตามความถี่ที่ตั้งไว้ วิธีนี้เหมาะสำหรับการเปลี่ยนความเร็วและสามารถรับความเร็วสูงได้ (สามารถตั้งค่าความถี่ได้สูงสุด 80Hz) เมื่อการควบคุมความเร็วด้วยโหลดที่แตกต่างกันไม่น่ากังวลมากนัก
แรงบิดที่สร้างขึ้น T ของมอเตอร์แสดงโดยสูตร (2) จากความสัมพันธ์นี้อาจกล่าวได้ว่าแรงบิดจะคงที่โดยการทำให้ V/f อัตราส่วนของแรงดันไฟฟ้า V ต่อความถี่ f คงที่
T=K・I・V/f ・・・(2)
T: แรงบิด [N·m]
V: แหล่งจ่ายไฟ [V]
I: กระแสไฟ [A]
f: คลื่นความถี่ [Hz]
K: คงที่
อย่างไรก็ตามยิ่งความเร็วต่ำเท่าไหร่ก็ยิ่งยากที่จะรักษาความต้านทานอินพุตของอินดักชั่นมอเตอร์ให้คงที่ด้วยการเปลี่ยนแปลงของ f ดังนั้นเพื่อให้ได้แรงบิดที่คงที่ตั้งแต่ความเร็วต่ำไปจนถึงความเร็วสูงจึงจำเป็นต้องปรับอัตราส่วน V/f ที่ความเร็วต่ำให้สอดคล้องกับลักษณะของมอเตอร์เช่นเส้นทึบที่แสดงในรูปที่ 23
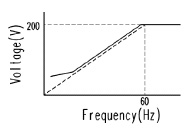
รูปที่ 21 การควบคุม V/f
2)การควบคุมด้วย Closed-Loop
รูปที่ 24 แสดงการกำหนดค่าบล็อกของระบบควบคุมวงปิดที่ใช้ใน BHF ซีรี่ส์
รูปที่ 22 แผนบล็อกของการควบคุมแบบ closed-loop
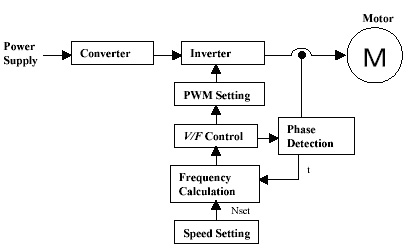
วิธีนี้จะตรวจจับความแตกต่างของเฟสระหว่าง Voltage ของบล็อกเอาต์พุต อินเวอร์เตอร์ และ กระแสหลักซึ่งจะคำนวณความถี่ในการขับที่สอดคล้องกับโหลดโดยใช้ตารางข้อมูลคุณลักษณะ (รูปที่ 25) ที่เตรียมไว้ล่วงหน้าและควบคุมความถี่อินเวอร์เตอร์โดยไม่ต้องตรวจสอบความเร็วของมอเตอร์
รูปที่ 23 ตารางข้อมูลคุณลักษณะ
ด้วยตารางคุณลักษณะนี้ และ เวลาความแตกต่างเฟสที่ตรวจพบ t อินเวอร์เตอร์จะคำนวณความถี่เอาต์พุตของอินเวอร์เตอร์ที่สอดคล้องกับคำสั่งความเร็วในการหมุน Nset ที่กำหนดโดยโพเทนชิโอมิเตอร์ความเร็วและส่งออกเป็นความถี่เอาต์พุตของอินเวอร์เตอร์ หลังจากได้รับความถี่เอาต์พุตบล็อกควบคุม V/f จะคำนวณแรงดันไฟฟ้าที่ใช้กับมอเตอร์ที่สอดคล้องกับความถี่เอาต์พุต f และดำเนินการควบคุมความเร็วโดยการขับอินเวอร์เตอร์ PWM ดังนั้นเมื่อมีการใช้โหลดความถี่เอาต์พุตของอินเวอร์เตอร์จะถูกเพิ่มขึ้นเพื่อให้ความเร็วในการหมุนลดลงอาจได้รับการชดเชย (3)
2.3.2. คุณลักษณะ
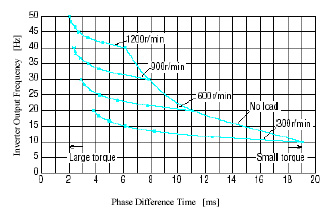
ลักษณะความเร็ว - แรงบิดในการหมุนของชุดอินเวอร์เตอร์แสดงไว้รูปที่ 26 และ รูปที่ 27 ตามที่อธิบายไว้ในส่วนเอซีมอเตอร์ควบคุมความเร็ว "เส้นการทำงานที่ปลอดภัย" จะถูกวาดบนลักษณะแรงบิด บรรทัดนี้แสดงถึงขีดจำกัดสำหรับการดำเนินการต่อเนื่องและพื้นที่ภายใต้บรรทัดนี้เรียกว่าพื้นที่การทำงานแบบต่อเนื่อง
รูปที่ 24 ลักษณะความเร็ว - แรงบิดในการหมุนสำหรับการควบคุม Open-Loop
รูปที่ 25 ลักษณะความเร็ว - แรงบิดในการหมุนสำหรับการควบคุม Closed Loop
3. สรุป
โอเรียนทัล มอเตอร์ มีกลุ่มผลิตภัณฑ์ 3 กลุ่ม (เอซีมอเตอร์ควบคุมความเร็ว, ดีซีมอเตอร์ไร้แปรงถ่าน และ ชุดอินเวอร์เตอร์) เพื่อใช้ในการควบคุมความเร็วที่หลากหลาย ผลิตภัณฑ์ควบคุมความเร็วที่เหมาะสมสามารถเลือกได้ตามฟังก์ชันประสิทธิภาพต้นทุน และ วัตถุประสงค์ที่ต้องการสำหรับการใช้งานของคุณ
โอเรียนทัล มอเตอร์ จะดำเนินการพัฒนาผลิตภัณฑ์อย่างต่อเนื่องเพื่อให้เราสามารถนำเสนอผลิตภัณฑ์ที่ตอบสนองความต้องการที่หลากหลายของลูกค้าได้ดีที่สุดในอนาคต
เอกสารอ้างอิง
(1) AC Motor Technology Study Group: “Book to understand AC small motor”, Kogyo Chosakai Publishing (1998)
(2) Kazuo Abe: “Low-noise drive technology of Brushless motor”, RENGA No.163, pp.19-25 (2003)
(3) Koji Namihana, Masayoshi Sato: “New control method of three-phase induction motor”, RENGA No.159, pp.23-28 (1999)
| Kazuya Shirahata Tsuruoka Plant, ACIX Operations Circuit Technology Division Circuit Development Section |
สำหรับประเทศสิงคโปร์: 1800-842-0280
สำหรับประเทศมาเลเซีย: 1800-806-161
สำหรับประเทศไทย: 1800-888-881
สำหรับประเทศอินเดีย: 1800-120-1995
สำหรับประเทศอื่นๆ: +65-6745-7344
เวลาเปิดทำการ
จันทร์ - ศุกร์: 8:30 AM - 5:30 PM
วันเสาร์/วันอาทิตย์/วันหยุดนักขัตฤกษ์: ปิดทำการ
