การออกแบบ AGV/AMR: ทำความเข้าใจเกี่ยวกับประโยชน์ของดีซีมอเตอร์แบบไร้แปรงถ่าน
ด้วยการตลาดที่มีการแข่งขันสูงและมีการเปลี่ยนแปลงตลอดทั้งปี จึงนำไปสู่ยุค IOT (Internet of Things) หรือ อุตสาหกรรม 4.0, ผู้ผลิตต่างมองหาวิธีการต่างๆเพื่อเป็นผู้นำตลาด อาทิ การเติบโตของการใช้งาน AGVs (Automated Guided Vehicles) และหุ่นยนต์อัตโนมัติ (AMRs) เช่นเดียวกับการเพิ่มขึ้นของระบบคลังสินค้าอัตโนมัติทั้งในคลังสินค้าทั่วไปและในโรงงานอุตสาหกรรม เหตุใดฟังก์ชัน และ คุณสมบัติของดีซีมอเตอร์ไร้แปรงถ่านแบบหัวเกียร์จึงน่าสนใจสำหรับการออกแบบระบบขับเคลื่อนของ AGV/AMRs
1. ความแตกต่างระหว่าง AGV และ AMRs?
AGV และ AMRs เป็นคำย่อที่ใช้ในการอธิบายยานยนต์เคลื่อนที่อิสระที่ใช้ในการขนส่งผลิตภัณฑ์หรือวัสดุรอบ ๆ คลังสินค้าหรือโรงงานผลิต ซึ่งสามารถช่วยเพิ่มประสิทธิภาพและประสิทธิผล ในขณะเดียวกันก็ลดความเสียหายและลดต้นทุนของผลิตภัณฑ์ ตัวอย่างเช่น ยานพาหนะขนาดใหญ่ สามารถแทนที่ด้วย AGV หรือ AMRs ที่มีขนาดเล็กลงได้ดังนั้นจึงเพิ่มความหนาแน่นของพื้นที่จัดเก็บให้สูงสุด ยานพาหนะที่ขับเคลื่อนด้วยตนเองเหล่านี้สามารถแบ่งได้เป็น 2 หมวดหมู่หลัก ได้แก่ ประเภท "ระบบช่วยนำทาง" และประเภท "การนำทางด้วยระบบอัจฉริยะ"
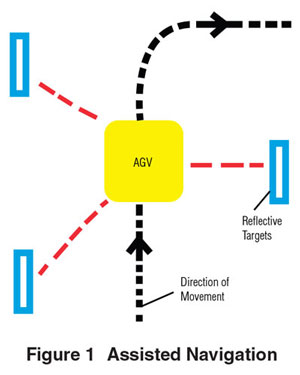
ระบบช่วยนำทาง
แต่ก่อน AGV เป็นคำเรียกที่ใช้อธิบายยานยนต์ที่เป็นการเคลื่อนที่อิสระ โดยการกำหนดค่า AGV จะถูก "นำทาง" โดยชุดของเครื่องหมายที่เซ็นเซอร์ตรวจจับได้ บางแอปพลิเคชันอาจต้องใช้เครื่องหมายหลายประเภทเพื่อให้ AGV นำทาง วิธีการนำทางที่ได้รับความนิยมมากที่สุดคือ การระบุตำแหน่งด้วยเลเซอร์ ด้วยวิธีนี้เลเซอร์เซ็นเซอร์บน AGV จะสแกนหาชิ้นงานอีกครั้งซึ่งวางอยู่ในตำแหน่งที่ทราบในพื้นที่ทำงานดังที่เห็นในรูปที่ 1 จากนั้นยานพาหนะจะทำการวิเคราะห์สัญญาณจากชิ้นงานอีกครั้งและคำนวณตำแหน่งสัมพัทธ์ที่แน่นอนและเส้นทางด้วยอัลกอริทึม วิธีการนำทางอื่น ๆ ได้แก่ การนำทางเฉื่อยการนำทางแบบกริด การนำทางด้วยเทปแม่เหล็ก การนำทางด้วยสายในตัว การนำทางแผนที่ และการนำทางด้วยแสง การนำทางและวิธีการเหล่านี้แตกต่างกันไปตามประเภทของเซ็นเซอร์หรือเครื่องหมายที่ใช้
ตัวอย่างประเภทของรถที่มีการนำทาง:
AGV (รถนำทางอัตโนมัติ)
AGC (รถลากอัตโนมัติ)
LGV (รถนำทางด้วยเลเซอร์)
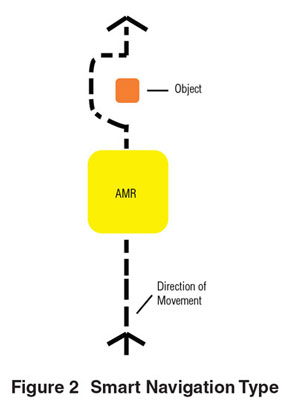
การนำทางอัจฉริยะ
AMRs เป็นความก้าวหน้าของเทคโนโลยี AGV โดย คำนิยาม AMR นั้นคือ“ วิ่งโดยไม่ต้องมีเส้นนำทาง” และไม่ได้ขึ้นอยู่กับเครื่องหมายต่างๆเพื่อนำทางพวกเขาไปยังจุดหมายปลายทาง ในบางกรณีความต้องการของจุดหมายใหม่ แถบแม่เหล็กอาจเป็นสิ่งที่ต้องการนำไปใช้ AMRs ที่ใหม่กว่าและชาญฉลาดกว่า ตอนนี้มีการทำแผนที่ 2 มิติ หรือ 3 มิติ รวมถึงกล้องเซ็นเซอร์และอัลกอริทึมที่ซับซ้อนมากขึ้น เพื่อให้ตัดสินใจได้ด้วยตัวเองมากขึ้น AMRs ใช้เซ็นเซอร์โดยที่ lidar เป็นตัวเลือกที่นิยมมากที่สุด เซ็นเซอร์ Lidar ใช้เลเซอร์พัลซิ่งและเครื่องตรวจจับที่มีความไวสูงเพื่อสำรวจและวัดระยะทางจากวัตถุ สิ่งนี้ช่วยในการโลคัลไลเซชัน และเทคโนโลยีการทำแผนที่พร้อมกับสร้างแผนที่จากสภาพแวดล้อมที่ไม่รู้จักและรักษาตำแหน่งภายในแผนที่นั้น ด้วยการควบคุมขั้นสูงนี้ AMRs สามารถกำหนดเส้นทางของตัวเองเพื่อหลีกเลี่ยงสิ่งกีดขวางได้ (ดูรูปที่ 2)
ตัวอย่างระบบการนำทางแบบอัจฉริยะ:
AMR (หุ่นยนต์เคลื่อนที่อัตโนมัติ)
AIV (รถลากแบบอิสระที่ใช้งานในที่ร่ม / รถลากอัจฉริยะแบบอัตโนมัติ)
VGV (การควบคุมรถลากด้วยระบบวิสัยทัศน์)
UGV (การควบคุมรถลากโดยปราศจากผู้ควบคุม)
SDV (รถลากที่สามารถขับเคลื่อนด้วยตัวเอง)
SGV (รถลากจูงด้วยตัวเอง)
2. 5 ส่วนหลักในการออกแบบรถ AGV/AMR
การออกแบบของ AGV และ AMR สามารถแบ่งออกเป็น 5 ส่วนหลัก ได้แก่ แบตเตอรี่,กล่องควบคุม,เซ็นเซอร์,กลไก และระบบการขับเคลื่อน
1. ส่วนแบตเตอรี่ของรถเป็นแหล่งพลังงานที่จ่ายพลังงานที่จำเป็นสำหรับอุปกรณ์ไฟฟ้าทุกชิ้นบนรถ ประเภทของแบตเตอรี่ที่ใช้ ได้แก่ ชนิดตะกั่วกับน้ำกรด, นิแคด, ลิเธียมไอออน,พลังงานอินดักทีฟ และเซลล์พลังงาน ก่อนที่แบตเตอรี่จะหมด AGV / AMR บางรุ่นจะเสนอให้เปลี่ยนแบตเตอรี่เพื่อให้ทำงานต่อไปได้ บางส่วนสามารถตั้งโปรแกรมให้กลับไปที่สถานีชาร์จได้
2. กล่องควบคุมเปรียบเหมือนการสั่งงานของสมอง สำหรับ AGV/AMR. การควบคุมโดยใช้ PLC, PAC หรือ IPC อาจจะต้องมีการโปรแกรมข้อมูลเพื่อการทำงานที่สอดคล้อง. การโปรแกรมแบบ HMI โดยผ่าน Touchscreen หรือ แผงป้อนเปรียบเสมือนกับการป้อนข้อมูล
3. เซ็นเซอร์ประเภทต่างๆทำหน้าที่เสมือนดวงตาของยานพาหนะซึ่งให้ข้อมูลเกี่ยวกับสภาพแวดล้อมของยานพาหนะ สามารถตรวจจับสิ่งกีดขวางได้ 2 วิธี ได้แก่ การตรวจจับแสงด้วยเลเซอร์เซนเซอร์หรือการตรวจจับกันชนเชิงกลด้วยเซ็นเซอร์ความดัน ตามมาตรฐานความปลอดภัย ANSI / ITSDF B56.5-2012 ทำหน้าที่เป็นแนวทางสำหรับข้อกำหนดในการปฏิบัติงานของ AGV / AMR นอกจากนี้ยังใช้อุปกรณ์ส่งสัญญาณกลับ เช่นตัวเข้ารหัสรีโซลเวอร์หรือเซ็นเซอร์ฮอลล์เอฟเฟกต์เพื่อคำนวณระยะทางที่เดินทาง และตรวจสอบความเร็วของยานพาหนะ
4. การเคลื่อนไหวใด ๆ ภายนอกไปยังระบบขับเคลื่อนจะถูกจัดระดับเป็นกลไกต่อพ่วง ในยานพาหนะส่วนใหญ่อาจมีกลไกการยก เพื่อยกน้ำหนัก และอาจเป็นตัวถาดป้อน ประตูหรือแขนที่ควบคุมด้วยมอเตอร์ หรือแอคชูเอเตอร์
5. ระบบขับเคลื่อนประกอบด้วยเพลาขับล้อ,มอเตอร์ไฟฟ้าและหัวเกียร์ ส่วนประกอบเหล่านี้เคลื่อนที่และควบคุมยานพาหนะ โดยทั่วไปแล้วทิศทางของรถจะถูกควบคุมโดยการหมุนล้อแบบซิงโครไนซ์หรืออิสระ
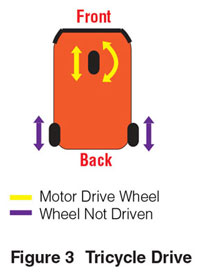
การออกแบบกลไกการขับเคลื่อน
รถลากแบบสามล้อ เป็นการออกแบบระบบขับเคลื่อนที่พบบ่อยที่สุด ล้อขับเคลื่อนหนึ่งล้อและล้อที่ไม่ขับเคลื่อน 2 ล้อใช้ในการกำหนดรูปสามเหลี่ยม ล้อขับเคลื่อนด้านหน้าเพียงล้อเดียวใช้ในการบังคับทิศทางและเคลื่อนย้ายรถ จำเป็นต้องใช้มอเตอร์เกียร์หนึ่งตัวในการหมุนล้อขับเคลื่อนและจำเป็นต้องใช้มอเตอร์อีกตัวในการบังคับทิศทาง ล้อทั้ง 3 ในการออกแบบนี้ให้ความคล่องแคล่วเพียงพอสำหรับการใช้งาน AGV / AMR ส่วนใหญ่
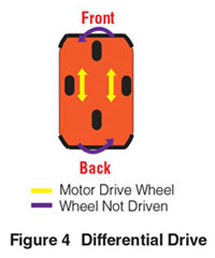
Differential Drive จะบังคับรถโดยใช้ความเร็วและทิศทางที่แตกต่างกันของล้อขับเคลื่อน 2 ล้อ ซึ่งรวมถึงมอเตอร์เกียร์ 2 ตัวสำหรับล้อขับเคลื่อน มันคล่องแคล่วมากเนื่องจากมันสามารถหมุนรอบศูนย์กลางของรถได้ แต่การวางตำแหน่งเชิงมุมนั้นแม่นยำน้อยกว่า
Quad Drive ใช้มอเตอร์เลี้ยว 2 ตัวและมอเตอร์ขับ 2 ตัว นอกจากนี้ยังมีความคล่องแคล่วอย่างมาก แต่มีความซับซ้อนมากกว่าการกำหนดทิศทางการขับเคลื่อนอื่น ๆ ยานพาหนะสามารถเคลื่อนที่ไปที่ศูนย์กลางของแกนและด้านข้างได้เช่นกัน

3. ทำไมต้องใช้ดีซีมอเตอร์ไร้แปรงถ่าน?
เหมาะสำหรับแหล่งพลังงานแบตเตอรี่ & กระจายความร้อนได้ดีขึ้น
แบตเตอรี่ผลิตแรงดันไฟฟ้ากระแสตรง ซึ่งทำให้เป็นแหล่งพลังงานที่เหมาะสำหรับมอเตอร์กระแสตรง มักใช้แบตเตอรี่ 24 หรือ 48VDC ซึ่งดีซีมอเตอร์ไร้แปรงถ่านสามารถทำงานร่วมกับได้อย่างง่ายดาย
อุณหภูมิในการทำงานที่สูงเป็นปัญหาสำหรับส่วนประกอบที่ไวต่อความร้อนใน AGV / AMR เมื่อเทียบกับดีซีมอเตอร์แบบมีแปรงถ่านแล้ว ดีซีมอเตอร์แบบไม่มีแปรงให้การกระจายความร้อนที่ดีกว่า เนื่องจากขดลวดมักจะอยู่นอกโรเตอร์ อุณหภูมิในการทำงานที่ลดลงสามารถช่วยยืดอายุและรอบการทำงานของมอเตอร์ได้ ตัวเลือกอื่น ๆ ได้แก่ สเต็ปปิ้งมอเตอร์และเซอร์โวมอเตอร์ อย่างไรก็ตามมอเตอร์สเต็ปปิ้งมอเตอร์ทั่วไปมักสร้างความร้อนได้ไม่น้อย แล ะประสิทธิภาพของเซอร์โวมอเตอร์มีต้นทุนที่สูงกว่า
การออกแบบที่กะทัดรัด
การลดขนาดของชิ้นส่วนและตัวรถเองก็มีความสำคัญสำหรับการใช้งานที่มีพื้นที่จำกัด ขนาดที่กะทัดรัดของดีซีมอเตอร์ไร้แปรงถ่านดึงดูดนักออกแบบ AGV / AMR อย่างมาก
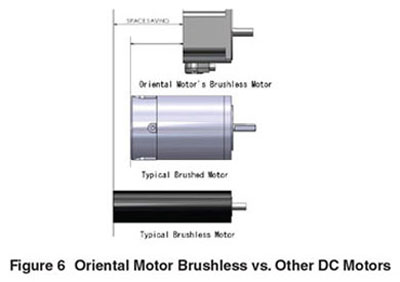
โอเรียนทัล มอเตอร์ เป็นผู้นำในอุตสาหกรรมด้วยการนำเสนอดีซีมอเตอร์เกียร์ไฟฟ้าแบบไร้แปรงถ่านในขนาดกะทัดรัดที่ไม่เหมือนใคร ความยาวที่สั้นลงและตัวมอเตอร์ที่กว้างขึ้นช่วยให้สามารถใช้โรเตอร์ที่ใหญ่ขึ้นพร้อมกับรับความเฉื่อยที่สูงขึ้นซึ่งสามารถรองรับการใช้งานที่มีภาระสูงเมื่อเทียบกับดีซีมอเตอร์งแบบไม่มีแปรงถ่านทรงกระบอกยาวแบบเดิม ความยาวของมอเตอร์จะลดลงเมื่อเทียบกับมอเตอร์แบบแปรงถ่าน (ดูรูปที่ 6)
ไม่ต้องการบำรุงรักษา
เพื่อลดการหยุดทำงานของ AGV/AMRs ดีซีมอเตอร์ไม่มีแปรงถ่านมีข้อได้เปรียบกว่าดีซีมอเตอร์แบบมีแปรงถ่าน เนื่องจากไม่ต้องดูแลรักษาแปรงถ่านเมื่อแปรงเสื่อมสภาพ เมื่อเวลาใช้งานและต้องเปลี่ยนเป็นระยะๆ ดีซีมอเตอร์ไร้แปรงถ่านไม่ใช้แปรงในการเปลี่ยนกระแสไฟฟ้า ดังนั้นอายุการใช้งานจึงยาวนานขึ้นมาก สิ่งนี้่สามารถลดต้นทุนแรงงานในการบำรุงรักษามอเตอร์และลดเวลาหยุดทำงาน การไม่มีฝุ่นจากแปรงเช่นเดียวกัน ปัญหาการเกิดประกายไฟมอเตอร์กระแสตรงแบบไม่มีแปรงยังสามารถใช้งานได้อย่างปลอดภัยกว่าดีซีมอเตอร์แบบแปรง ด้วยการใช้ไดรเวอร์เพื่อเปลี่ยนขั้วแม่เหล็กไฟฟ้าในขดลวดแทนการใช้แปรงถ่าน ดีซีมอเตอร์แบบไม่มีแปรงยังสร้างสัญญาณรบกวนทางไฟฟ้าและเสียงรบกวนน้อยกว่าดีซีมอเตอร์แบบแปรง
ช่วงความเร็วกว้าง, แรงบิดแบบแบน, ลักษณะการทำงานต่อเนื่องที่มีประสิทธิภาพของ Closed loop
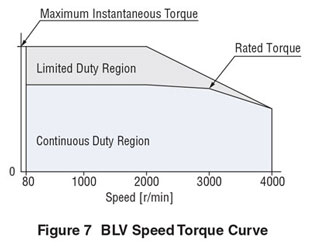
เมื่อเคลื่อนย้ายวัตถุจากจุด A ไป จุด B AGV/AMR จะทำงานอย่างต่อเนื่องและรับภาระ ในการรับน้ำหนักบรรทุกสูงสุดด้วยความเร็วที่แตกต่างกัน มอเตอร์จะต้องสามารถวิ่งด้วยความเร็วต่างๆด้วยแรงบิดคงที่ ช่วงความเร็วที่กว้างและแรงบิดคงที่ ลักษณะแรงบิดของมอเตอร์แบบไม่มีแปรงช่วยให้นักออกแบบสามารถออกแบบได้แรงบิดสูงสุด มอเตอร์แบบไร้แปรงถ่านเหมาะกับการทำงานที่ต่อเนื่องเนื่องจากมีประสิทธิภาพสูง สามารถทำงานได้อย่างต่อเนื่องโดยไม่ต้องใช้แผ่นระบายความร้อนเพิ่มเติมซึ่งสามารถช่วยเพิ่มผลผลิตได้ กราฟแรงบิดของมอเตอร์ไร้แปรงถ่านแสดงในรูปที่ 7
ประสิทธิภาพของวงจรส่งสัญญาณกลับของดีซีมอเตอร์แบบไม่มีแปรงถ่าน ทำได้โดยใช้สัญญาณจากเซ็นเซอร์ Hall-effect เซ็นเซอร์เหล่านี้อยู่ด้านหลังของมอเตอร์และให้สัญญาณไปยังไดรเวอร์แบบไร้แปรงถ่านเพื่อควบคุมความเร็ว ความละเอียดพื้นฐานสำหรับมอเตอร์ไร้แปรงของโอเรียนทัล มอเตอร์ คือ 30 พัลส์ต่อรอบ (PPR) ไดรเวอร์สามารถควบคุมความเร็วความผันผวนได้ที่ไม่เกิน +/- 0.5% ถือเป็นความแม่นยำระดับเซอร์โว
สัญญาณส่งกลับจากมอเตอร์สำหรับการควบคุมแบบโซน
การควบคุมแบบโซนต้องใช้ยานพาหนะที่มีการตรวจจับวัตถุที่มีความไวสูง ซึ่งในแต่ละโซนจะวัตถุแตกต่างกัน เพื่อส่งเสียงเตือนหรือสั่งให้หยุดเคลื่อนที่ เมื่อสิ่งกีดขวางอยู่ในเขตระยะพื้นที่ตรวจจับสัญญาณขอแนะนำให้รถชะลอความเร็วและส่งสัญญาณเตือนเพื่อแจ้งให้เจ้าหน้าที่ทราบ เมื่อสิ่งกีดขวางอยู่ในเขตหยุด ที่ใกล้กับรถมากที่สุดควรหยุดรถทันที การตรวจจับแบบโซนสามารถปรับแต่งเพิ่มเติมได้โดยผู้ออกแบบ
เพื่อเพิ่มประสิทธิภาพในการตรวจจับแบบโซน อีกทางเลือกหนึ่งคือตรวจสอบสัญญาณส่งกลับจากมอเตอร์ มอเตอร์ขับเคลื่อนต้องการความละเอียดของสัญญาณส่งกลับที่เพียงพอ เพื่อตรวจจับโซนต่างๆได้อย่างรวดเร็วภายในพื้นที่ตรวจจับสัญญาณ สัญญาณการตอบสนองของมอเตอร์เช่น hall-effect เซ็นเซอร์ IC สามารถส่งพัลส์ดิจิทัลกลับไปยังไดรเวอร์ โดยมาตรฐานจะมีความละเอียด 30 พัลส์ต่อการหมุน 1 รอบ (PPR) ที่เพลามอเตอร์สามารถคูณด้วยอัตราทดของหัวเกียร์ การใช้งาน AGV หรือ AMR ทั่วไปต้องการแรงบิดสูงและความเร็วต่ำจึงมักจะเลือกอัตราทดเกียร์ที่สูงสำหรับมอเตอร์เกียร์ ในตัวอย่างถัดไปเราจะแสดงวิธีการแปลงความละเอียดของสัญญาณส่งกลับจากเพลามอเตอร์ไปยังล้อขับเคลื่อน
คุณลักษณะ:
30 PPR (ที่มอเตอร์)
อัตราทด 50:1
ล้อขับเคลื่อนเส้นผ่านศูนย์กลาง 10"
การแปลง:
1. แปลงจากความละเอียดพัลส์เพลามอเตอร์เป็นความละเอียดพัลส์เพลาเกียร์:
30 PPR x 50:1 อัตราทดเกียร์= 1500 PPR
2. แปลงความละเอียดของเพลาเกียร์เป็นองศาต่อพัลส์:
360 องศา / 1500 PPR = 0.24 องศาต่อพัลส์
3.แปลงจากองศาต่อพัลส์เป็นระยะเชิงเส้นต่อพัลส์:
(10" x Π) / 1500 PPR = 0.02" ต่อพัลส์
ในกรณีส่วนใหญ่ความละเอียดเชิงเส้นของล้อขับเคลื่อน 0.02" นั้นเพียงพอสำหรับการตรวจจับการควบคุมโซน
เมื่อหยุด AGV/AMR ปัจจัยอื่น ๆ เช่นการหมุนโอเวอร์รันจะมีผลอิทธิพลเช่นกัน มอเตอร์แบบไร้แปรงถ่านที่ความเร็ว 2500 รอบต่อนาทีจะมีค่าโอเวอร์รันอยู่ที่ประมาณ 2.6 รอบที่เพลามอเตอร์เมื่อทำงานภายในความเฉื่อยของโหลดปกติ สำหรับล้อที่มีเส้นผ่านศูนย์กลาง 10" และมอเตอร์เกียร์ 50: 1 จะเท่ากับ 1.63" นับจากเวลาที่ได้รับคำสั่งหยุด
(2.6 รอบ / อัตราส่วน 50:1) x 10” x Π =1.63”
การโอเวอร์รันแตกต่างกันไปขึ้นอยู่กับความเร็ว ความเฉื่อยของโหลดและขนาดมอเตอร์
การเบรค
มาตรฐาน ANSI/ITSDF B56.5-2012 เป็นรายการข้อกำหนดสำหรับการเบรกฉุกเฉิน เบรกจอดรถและเบรกบริการใน AGV/AMR ในขณะที่แอคชูเอเตอร์แบบไฮดรอลิกหรือนิวเมติกและมอเตอร์ที่มีเบรกแม่เหล็กไฟฟ้าสามารถใช้ฟังก์ชั่นเหล่านี้ได้เต็มที่ เบรกแม่เหล็กไฟฟ้าทำงานโดยจะใช้แรงเสียดทานเพื่อหยุดและยึดเพลามอเตอร์ให้อยู่ในตำแหน่งซึ่งเหมาะสำหรับการจอดตามข้อกำหนดการเบรก ในกรณีส่วนใหญ่มอเตอร์และไดรเวอร์จะมีฟังก์ชันต่างๆเช่นการเบรกแบบไดนามิก (เบรกไฟฟ้า) ในการเบรกแบบไดนามิกการหยุดทันทีทำได้โดยการปิดกระแสไฟฟ้าไปยังมอเตอร์และลัดวงจรทุกเฟสเข้าด้วยกัน ส่งผลให้เกิดสภาวะโรเตอร์ล็อกซึ่งขัดขวางการหมุนของมอเตอร์ การผสมผสานระหว่างการเบรกแบบไดนามิกกับการลดความเร็วและการเบรกแบบแม่เหล็กไฟฟ้าการเบรกมีประสิทธิภาพ
เนื่องจากแรงเสียดทานทำให้เกิดการเบรก ขอแนะนำให้ใช้เบรกแบบไดนามิกเพื่อหยุดมอเตอร์ จากนั้นเปิดใช้งานเบรกแม่เหล็กไฟฟ้าเพื่อจอด AGV/AMR การซื้อมอเตอร์พร้อมเบรกแม่เหล็กไฟฟ้าที่ประกอบไว้แล้วช่วยรับประกันประสิทธิภาพและประหยัดเวลา เนื่องจากเวลาที่ใช้ในการติดตั้งและการทดสอบจะลดลงเนื่องจากมีการทดสอบและรับรองเฉพาะโดยผู้ผลิตมอเตอร์แล้ว
4. ตัวเลือกเกียร์
ชนิดของเพลาเกียร์และประเภทการติดตั้ง
การเลือกหัวเกียร์ที่เหมาะสมคือการตัดสินใจที่สำคัญในการออกแบบระบบขับเคลื่อนให้ประสบความสำเร็จ มีหัวเกียร์หลายแบบในตลาดที่ี่หลากหลาย เช่น เพลาแข็งหรือกลวง ตลอดจนเฟืองเกลียวหรือไฮปอยด์ แม้ว่าประเภทของเพลาจะมีผลต่อการออกแบบระบบขับเคลื่อน แต่ประเภทของเกียร์อาจส่งผลต่อประสิทธิภาพการทำงาน ตัวอย่างเช่นหัวเกียร์แบบเพลากลวงสามารถช่วยลดข้อต่อช่อว่างของการขบเฟืองอาจส่งผลต่อการตรวจจับแบบโซนในการทำงานแบบสองทิศทางและประสิทธิภาพของเกียร์อาจส่งผลต่อความสามารถในการบรรทุก
นอกจากเพลาและเกียร์แล้วยังต้องพิจารณาประเภทของการติดตั้งของหัวเกียร์ด้วย แนวการติดตั้งสามารถเป็นแนวขนานกันหรือเป็นมุมฉากกับมอเตอร์ และประเภทการติดตั้งอาจเป็นแบบติดตั้งแบบวางพื้นหรือแบบยึดผนังเพลท หัวเกียร์แบบติดตั้งที่พื้นช่วยลดความจำเป็นในการซื้อหรือสร้างขายึด และหัวเกียร์แบบติดตั้งกับแผ่นเพลทสามารถช่วยลดพืนที่ฐานติดตั้งได้
นักออกแบบจำเป็นต้องเลือกประเภทของหัวเกียร์ที่เหมาะสมกับการออกแบบระบบขับเคลื่อนมากที่สุดรวมทั้งให้ประสิทธิภาพเท่าที่จำเป็น ในกรณีส่วนใหญ่เฟืองเดือยขดลวด (helical gear) หรือ เกียร์ไฮพอยด์ (hypoid gears) ที่สามารถใช้งานได้ ในขณะที่ไม่แนะนำให้ใช้วอร์มเกียร์ (worm gears) ที่มีน้ำหนักเบาสำหรับการใช้งานที่มีภาระงานสูง มอเตอร์ที่มีเบรกในตัวก็นำมาพิจารณาเช่นเดียวกัน การซื้อชุดมอเตอร์และเกียร์จากผู้ผลิตรายเดียวกันจะการันตีได้ครอบคลุมเสปคทั้งหมดของมอเตอร์ และ ประหยัดเวลาด้วย

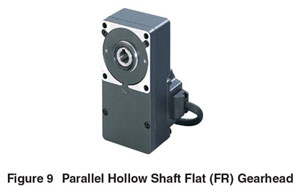
การประหยัดพื้นที่ด้วยหัวเกียร์แบบหักศอกเพลาหลุม (FR)
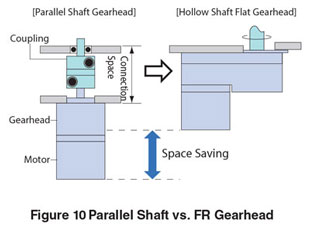
ตัวเลือกหัวเกียร์ยอดนิยมที่ใช้สำหรับการออกแบบ AGV/AMR คือชนิดเพลากลวง ในขณะที่หัวเกียร์แบบเพลากลวงหลายแบบเป็นแบบมุมฉาก แต่โอเรียนทัล มอเตอร์ มีหัวเกียร์ และมอเตอร์ที่เป็นเอกลักษณ์ เป็นหัวเกียร์แบบขนานที่ออกแบบมาเพื่อประหยัดพื้นที่ ให้แรงบิดสูงและขับเคลื่อนกลับทางหมุนได้เท่าที่ต้องการ เราสามารถพบได้ใน BLV & BLH BLH ซีรี่ส์strong> หัวเกียร์เพลากลวงคู่ขนาน สามารถติดเพลาขับและล้อจากด้านใดด้านหนึ่ง นอกจากนี้ยังสามารถลดเวลาในการประกอบและค่าแรงโดยลดส่วนประกอบที่จำเป็นในการประกอบเช่นข้อต่อมู่เล่ย์หรือสายพานที่เชื่อมต่อเพลาเกียร์เข้ากับเพลาขับ (ดูรูปที่ 10)
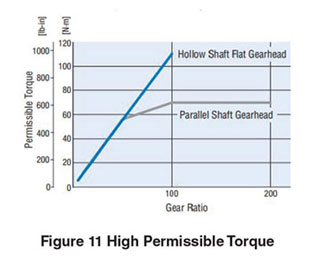
แรงบิดที่สามารถทำได้สูงสุด
หัวเกียร์ FR เหล่านี้ให้แรงบิดที่สูงกว่า เมื่อเทียบกับหัวเกียร์เพลาขนาน (ดูรูปที่ 11) กล่องเกียร์ FR ได้รับการสร้างให้มีความแข็งแกร่งมากขึ้นและรูปแบบตามยาวช่วยให้สามารถใส่เกียร์ได้ใหญ่ขึ้น การเปลี่ยนแปลงการออกแบบทั้งสองอย่างนำไปสู่แรงบิดที่สูงขึ้น พื้นที่เพิ่มเติมในหัวเกียร์ FR ยังช่วยให้แบริ่งมีขนาดใหญ่ขึ้นซึ่งส่งผลให้รับน้ำหนักบรรทุกมากขึ้น และเพิ่มอายุการใช้งานของหัวเกียร์ การออกแบบชุดเกียร์นี้ยังมีคุณสมบัติลดเสียงรบกวนเนื่องจากที่เพลามีฟันที่ละเอียดขึ้น คุณสมบัติเหล่านี้ช่วยให้ AGV/AMR ให้การทำงานที่มีเสียงรบกวนต่ำพร้อมความสามารถในการรับน้ำหนักที่เพิ่มขึ้นและอายุการใช้งานนานขึ้น
5. ดีซีมอเตอร์แบบไร้แปรงถ่าน
ง่ายและเป็นมิตรกับผู้ใช้งาน
เนื่องจากผู้ปฏิบัติงานจำเป็นต้องคุ้นเคยกับการใช้การควบคุมหรือการตั้งโปรแกรมควบคุมรถ การควบคุมจึงต้องเป็นมิตรกับผู้ใช้ เพื่อใช้งานง่ายและเป็น Plug & Play ซึ่งเป็นคุณสมบัติที่สำคัญสำหรับคอนโทรลเลอร์มอเตอร์แบบไม่มีแปรงถ่าน (โดยทั่วไปเรียกว่าไดรเวอร์มอเตอร์) นอกจากนี้ไดรเวอร์บางตัวยังมีความสามารถในการปรับแต่ง อินพุตเอาต์พุตให้เหมาะสมสำหรับการใช้งานแต่ละประเภท
การควบคุมความเร็วและทิศทางของมอเตอร์จะต้องมีความยืดหยุ่นและง่ายต่อการใช้งานเพื่อลดระยะเวลาในการพัฒนาทางวิศวกรรม รถบางคันใช้สัญญาณอินพุตแบบอนาล็อก (I/O) ในรูปแบบของโพเทนชิออมิเตอร์หรือแรงดันไฟฟ้าอะนาล็อกที่ป้อนจากภายนอก 0 ~ 10 VDC และบางส่วนใช้ข้อมูลความเร็วที่จัดเก็บไว้ซึ่งสามารถตั้งโปรแกรมแบบดิจิทัลบนไดรเวอร์เฉพาะหรือผ่านเครือข่าย fieldbus
ฟังก์ชันที่เป็นประโยชน์ออกแบบมาสำหรับ AGV/AMR
การควบคุมเวกเตอร์ เป็นคุณสมบัติในตัวที่ใช้สำหรับการทำงานทางลาดชันโดยรักษาความเร็วให้คงที่ เป็นคุณสมบัติที่สำคัญและเป็นประโยชน์ต่อการตรวจสอบให้แน่ใจว่า AGV/AMR สามารถบรรทุกและเคลื่อนที่ด้วยความเร็วคงที่บนเส้นทางลาดเอียงขึ้นและเอียงลง
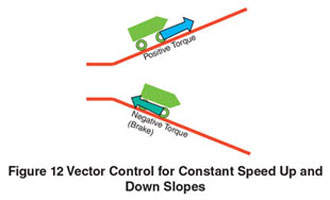
เมื่อเดินทางบนทางลาดปัญหาคือ Back EMF หรือแรงเคลื่อนไฟฟ้าย้อนกลับ เมื่อมอเตอร์ขับเคลื่อนด้วยแรงภายนอกเช่นแรงโน้มถ่วง สิ่งนี้ทำให้มอเตอร์สร้างแรงดันไฟฟ้าซึ่งกลับไปที่วงจรขับโดยตรง Back EMF ยังสามารถเกิดขึ้นได้เมื่อผลัก AGV/AMR โดยที่ไม่ได้ใช้พลังงานหรือหยุดกะทันหันด้วยภาระความเฉื่อยขนาดใหญ่ หากไม่ได้รับการจัดการ Back EMF อย่างเหมาะสมอาจทำให้ผลิตภัณฑ์เสียหายได้ หากจำเป็นวิธีการลด EMF กลับคือการตั้งโปรแกรมเวลาการชะลอตัวที่นานขึ้นหรือตั้งค่าฟังก์ชันไดรเวอร์ที่ทำให้การตอบสนองของมอเตอร์ล่าช้าลง
ฟังก์ชันต่างๆ เช่น โหมดตอบสนองความเร็วเพื่อช่วยในลด Back EMF การตอบสนองต่ำทำให้การตอบสนองของมอเตอร์ล่าช้าโดยใช้การหน่วงเวลากับข้อมูลคำสั่งความเร็วที่ใช้ภายในไดรเวอร์ ฟังก์ชันนี้ช่วยให้มอเตอร์ตอบสนองในอัตราที่ช้าลงเพื่อช่วยลด EMF ที่สร้างขึ้น
การลดเวลาหยุดทำงานด้วยการใช้ฟังก์ชันมอนิเตอร์
การตรวจสอบสภาพของมอเตอร์และไดรเวอร์ในรถช่วยให้สามารถบำรุงรักษาเชิงป้องกันและสามารถลดเวลาการหยุดทำงานลงได้ เมื่อสัญญาณเตือนดังขึ้นสำหรับมอเตอร์โดยทั่วไปมอเตอร์จะหยุดจนกว่าปัญหาจะได้รับการแก้ไข สิ่งสำคัญคือต้องทราบถึงปัญหาที่คาดว่าอาจเกิดขึ้นก่อนที่จะมีการแจ้งเตือนเหล่านี้และจุดที่มีการตรวจสอบเพื่อให้เกิดเหตุการณ์นี้ขึ้นจำเป็นต้องใช้ระบบสัญญาณวงจรส่งกลับที่มีการตอบสนองของมอเตอร์ ข้อมูลสถานะของมอเตอร์และไดรเวอร์จะต้องถูกส่งต่อไปยังตัวควบคุมหลัก ซึ่งสามารถทำได้ด้วย PLC ไม่ว่าจะผ่าน I/O หรือผ่านเครือข่าย bus eldbus อุตสาหกรรมเช่น Modbus RTU หรือ EtherCAT
ระบบมอเตอร์ และ ไดรเวอร์บางระบบสามารถให้ข้อมูลส่งกลับเกี่ยวกับอุณหภูมิและระยะทางเพื่อช่วยป้องกันปัญหาก่อนที่จะเกิดขึ้น ในบางกรณีอาจมีการส่งสัญญาณเตือนง่ายๆจากไดรเวอร์ มอเตอร์ก่อนที่สัญญาณเตือนแบบรุนแรงจะเกิดขึ้น นี่เป็นโอกาสสำหรับผู้ปฏิบัติงานในการดำเนินการตรวจสอบเพื่อแก้ไขได้ทันท่วงทีก่อนที่รถจะเกิดปัญหา
6. บทสรุป
เมื่อพิจารณาการออกแบบระบบขับเคลื่อนของ AGV/AMR สิ่งสำคัญคือต้องเข้าใจความสามารถและประโยชน์ที่ได้รับของดีซีมอเตอร์เกียร์แบบไร้แปรงถ่าน
ด้วยขนาดกะทัดรัดของดีซีมอเตอร์ไร้แปรงถ่านที่มีช่วงความเร็วกว้าง แรงบิดคงที่ สามารถจับคู่กับตัวเลือกเกียร์มากมายเช่นหัวเกียร์ FR และนอกจากนี้ ไดรเวอร์ยังมีประสิทธิภาพสูงเพื่อเพิ่มความสามารถในการทำงานของระบบขับเคลื่อน AGV/AMR มอเตอร์ไร้แปรงถ่านเป็นวิธีแก้ปัญหาระยะยาวเมื่อเปรียบเทียบกับมอเตอร์แบบแปรงและเป็นตัวเลือกที่คุ้มค่าเมื่อเทียบกับเซอร์โวมอเตอร์
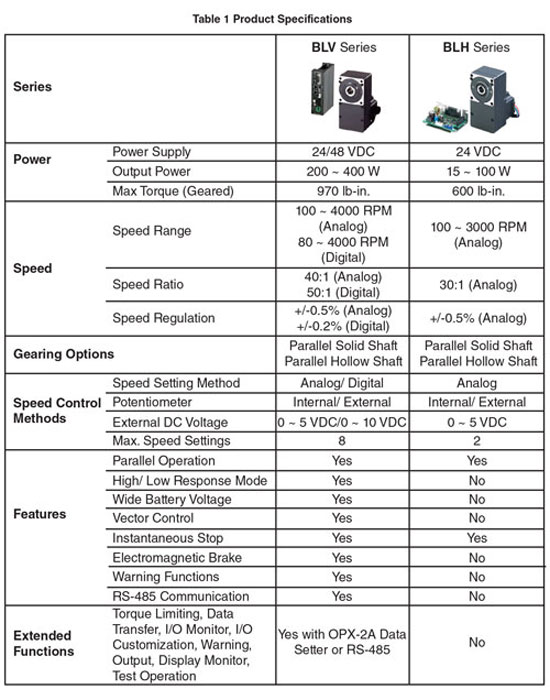
ข้อได้เปรียบที่เป็นจุดเด่นของโอเรียน ทัลมอเตอร์ เช่น ชุดเกียร์,ชุดเบรกและไดรเวอร์ ทำให้สามารถช่วยลดเวลาในการพัฒนาผลิตภัณฑ์และสามารถรับประกันคุณสมบัติเฉพาะได้ ซีรี่ส์ BLV มีกำลังขับสูงออกแบบมาสำหรับ AGV/AMR ซีรี่ส์ ส่วน BLH ที่มีขนาดกะทัดรัดก็เป็นอีกทางเลือกหนึ่ง ซีรี่ส์ BLH ได้รับการออกแบบมาเพื่อการใช้งานทั่วไป แต่ซีรี่ส์ BLV ได้รับการออกแบบโดยคำนึงถึง AGV/AMR หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับกลุ่มผลิตภัณฑ์มอเตอร์เกียร์แบบไม่มีแปรงถ่านชนิดแรงดัน 24/48 VDC ของเราโปรดดูตารางต่อไปนี้ด้านล่าง
สำหรับรายละเอียดเพิ่มเติมเกี่ยวกับฟังก์ชัน AGV/AMR ที่นำเสนอโดยซีรีส์ BLV โปรดอ่านเอกสารสีขาว “10 คุณสมบัติมาตรฐานสำหรับแอปพลิเคชันระบบขับเคลื่อน AGV/AMR”
สำหรับประเทศสิงคโปร์: 1800-842-0280
สำหรับประเทศมาเลเซีย: 1800-806-161
สำหรับประเทศไทย: : 1800-888-881
สำหรับประเทศอินเดีย: 1800-120-1995
สำหรับประเทศอื่นๆ: +65-6745-7344
เวลาเปิดทำการ
จันทร์ - ศุกร์: 8:30 AM - 5:30 PM
วันเสาร์/วันอาทิตย์/วันหยุดนักขัตฤกษ์: ปิดทำการ

