การออกแบบ AGV / AMR: ทำความเข้าใจเกี่ยวกับประโยชน์ของมอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC Motor)
การเปลี่ยนแปลงในตลาดที่มีการแข่งขันสูงขึ้นในช่วงหลายปีที่ผ่านมา นำไปสู่การพัฒนา IoT (Internet of Things) หรืออุตสาหกรรม 4.0 ทำให้ผู้ผลิตต้องมองหาวิธีการที่ชาญฉลาดกว่าเพื่อสร้างความได้เปรียบเหนือคู่แข่ง หนึ่งในตัวอย่างที่ชัดเจนคือแนวโน้มที่เพิ่มขึ้นของ รถยนต์นำทางอัตโนมัติ (AGVs) และ หุ่นยนต์เคลื่อนที่อัตโนมัติ (AMRs) รวมถึงการเพิ่มขึ้นของระบบจัดเก็บและเรียกคืนอัตโนมัติในทั้งคลังสินค้าและโรงงานผลิต ในเอกสารนี้ เราจะนำเสนอข้อมูลเบื้องต้นเกี่ยวกับ AGV/AMR และอธิบายว่าทำไมคุณสมบัติและลักษณะของมอเตอร์ DC แบบไร้แปรงถ่านที่มาพร้อมเกียร์จึงเป็นตัวเลือกที่น่าสนใจสำหรับการออกแบบระบบขับเคลื่อนของ AGV/AMR
ข้อที่ 1: ความแตกต่างระหว่าง AGVs และ AMRs คืออะไร?
AGV และ AMR เป็นคำย่อที่ใช้สำหรับยานพาหนะอัตโนมัติที่สามารถเคลื่อนที่ได้ด้วยตัวเอง โดยมีบทบาทสำคัญในการขนส่งผลิตภัณฑ์หรือวัสดุต่าง ๆ ภายในคลังสินค้าและโรงงานอุตสาหกรรม ยานพาหนะเหล่านี้ช่วยเพิ่มความปลอดภัย ประสิทธิภาพ และผลผลิต รวมถึงลดความเสียหายของสินค้าและต้นทุน ตัวอย่างเช่น รถที่ควบคุมด้วยคนขนาดใหญ่สามารถถูกแทนที่ด้วย AGV หรือ AMR ขนาดเล็ก ซึ่งช่วยเพิ่มความหนาแน่นของการจัดเก็บสินค้าให้มากยิ่งขึ้น ยานพาหนะอัตโนมัติเหล่านี้สามารถแบ่งออกได้เป็น 2 ประเภทหลัก ได้แก่ ประเภท “การนำทางแบบช่วยเหลือ (Assisted Navigation)” และประเภท “การนำทางอัจฉริยะ (Smart Navigation)”
การนำทางแบบช่วยเหลือ (Assisted Navigation)
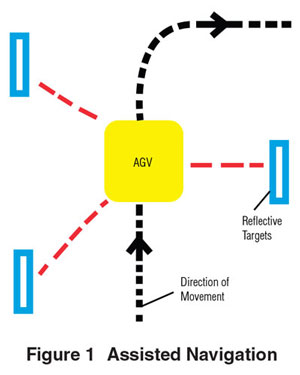
โดยทั่วไป คำว่า AGV (Automated Guided Vehicle) ถูกใช้เป็นคำจำกัดความสำหรับยานพาหนะอัตโนมัติที่เคลื่อนที่โดยใช้ "ตัวนำทาง" (Guidance) บางแอปพลิเคชันอาจต้องใช้มาร์กเกอร์หลายประเภทเพื่อช่วยให้ AGV สามารถนำทางได้ วิธีการนำทางที่ได้รับความนิยมมากที่สุดคือการใช้ Laser Triangulation ด้วยวิธีนี้ เซ็นเซอร์เลเซอร์บน AGV จะสแกนหาตัวสะท้อนแสงที่ตั้งอยู่ในตำแหน่งที่รู้จักในพื้นที่ทำงานตามที่เห็นในรูปที่ 1 จากนั้นยานพาหนะจะทำการคำนวณสัญญาณจากตัวสะท้อนแสงด้วยวิธีร์ Triangulation และประมวลผลตำแหน่งสัมพัทธ์ที่แม่นยำ รวมถึงเส้นทางการเคลื่อนที่ด้วยอัลกอริทึม วิธีการนำทางอื่น ๆ ได้แก่ การนำทางด้วยความเฉื่อย (Inertial Navigation), การนำทางด้วยโครงสร้างกริด (Grid Navigation), การนำทางด้วยแถบแม่เหล็ก (Magnetic Tape Navigation), การนำทางด้วยสายไฟฝังพื้น (Embedded Wire Navigation), การนำทางด้วยแผนที่ (Map Navigation) และการนำทางด้วยสัญญาณทางสายตา (Optical Navigation) วิธีการนำทางเหล่านี้มีความแตกต่างกันตามประเภทของมาร์กเกอร์ที่ใช้
ตัวอย่างประเภทการนำทางแบบช่วยเหลือ (Assisted Navigation Type):
AGV (Autonomous Mobile Robot): หุ่นยนต์เคลื่อนที่อัตโนมัติ
AGC (Automated Guided Carts): รถเข็นที่นำทางด้วยระบบอัตโนมัติ
LGV (Laser Guided Vehicles): ยานพาหนะที่นำทางด้วยเลเซอร์
การนำทางอัจฉริยะ (Smart Navigation)
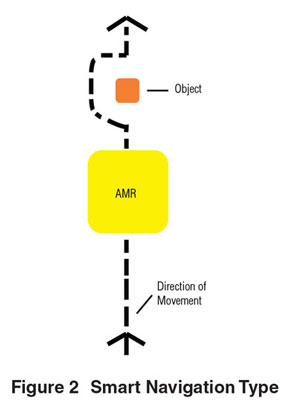
AMR คือการพัฒนาต่อยอดเทคโนโลยีจาก AGV โดยตามคำนิยามแล้ว AMR เป็นยานพาหนะที่ "ไม่ต้องถูกนำทาง" และไม่จำเป็นต้องพึ่งพาเครื่องหมายหรือเป้าหมายสะท้อนแสงในการนำทางไปยังจุดหมาย ในบางกรณี การติดตั้งเป้าหมายสะท้อนแสงหรือเครื่องหมายแม่เหล็กอาจทำได้ยาก AMR รุ่นใหม่ที่ฉลาดกว่านี้มีการใช้ การทำแผนที่แบบ 2 มิติหรือ 3 มิติ รวมถึงกล้องที่ซับซ้อนกว่า เซ็นเซอร์ และอัลกอริทึม เพื่อให้สามารถตัดสินใจได้ด้วยตัวเอง AMR ใช้ เซ็นเซอร์ไลดาร์ (Lidar sensors) เป็นตัวเลือกที่ได้รับความนิยมมากที่สุด เซ็นเซอร์ไลดาร์ใช้ลำแสงเลเซอร์แบบพัลส์และตัวตรวจจับที่มีความไวสูงในการสำรวจและวัดระยะห่างจากวัตถุ สิ่งนี้ช่วยในเทคโนโลยีการระบุตำแหน่งและการทำแผนที่ไปพร้อมกัน เพื่อสร้างแผนที่จากสภาพแวดล้อมที่ไม่รู้จักและรักษาตำแหน่งภายในแผนที่นั้น ด้วยการควบคุมขั้นสูงนี้ AMR สามารถกำหนดเส้นทางของตัวเองเพื่อหลีกเลี่ยงสิ่งกีดขวางได้ (ดูรูปที่ 2)
ตัวอย่างประเภทการนำทางแบบอัจฉริยะ (Smart Navigation Type):
AMR (Autonomous Mobile Robot): หุ่นยนต์เคลื่อนที่อัตโนมัติ
AIV (Autonomous Indoor Vehicle/ Autonomous Intelligent Vehicle): ยานพาหนะอัตโนมัติสำหรับใช้งานในอาคาร / ยานพาหนะอัจฉริยะ
VGV (Vision Guided Vehicle): ยานพาหนะที่นำทางด้วยการมองเห็น
UGV (Unmanned Ground Vehicle): ยานพาหนะภาคพื้นดินไร้คนขับ
SDV (Self-Driving Vehicle): ยานพาหนะขับเคลื่อนด้วยตัวเอง
SGV (Self-Guided Vehicle): ยานพาหนะนำทางด้วยตัวเอง
ข้อที่ 2: สำคัญในการออกแบบ AGV/AMR 5 ด้าน
การออกแบบ AGV และ AMR สามารถแบ่งออกเป็น 5 ส่วนหลัก: แบตเตอรี่ ตัวควบคุม เซ็นเซอร์ กลไกรอบข้าง และระบบส่งกำลัง
1. ส่วน แบตเตอรี่ (Battery) ของยานพาหนะเป็นแหล่งพลังงานที่จ่ายกำลังไฟฟ้าที่จำเป็นให้กับอุปกรณ์ไฟฟ้าทุกชิ้นบนยานพาหนะ ประเภทของแบตเตอรี่ที่ใช้ได้แก่ แบตเตอรี่ตะกั่วกรดแบบน้ำ นิกเกิล-แคดเมียม ลิเธียมไอออน พลังงานเหนี่ยวนำ และเซลล์เชื้อเพลิง ก่อนที่แบตเตอรี่จะหมด AGV/AMR บางรุ่นมีระบบสลับแบตเตอรี่เพื่อให้สามารถทำงานต่อได้ บางรุ่นสามารถตั้งโปรแกรมให้กลับไปยังสถานีชาร์จได้
2. ตัวควบคุม (Controller) ทำหน้าที่เป็นสมองของ AGV/AMR โดย PLC, PAC หรือ IPC จะประมวลผลข้อมูลที่ได้รับจากเซ็นเซอร์และมีการเขียนโปรแกรมที่จำเป็นเพื่อให้ทำงานได้โดยอัตโนมัติ ส่วนอินเตอร์เฟซการเขียนโปรแกรม HMI เช่น หน้าจอสัมผัส หรือรีโมทควบคุม ใช้สำหรับป้อนข้อมูล
3. เซ็นเซอร์ (Sensors) หลากหลายประเภททำหน้าที่เป็นดวงตาของยานพาหนะ ซึ่งให้ข้อมูลเกี่ยวกับสภาพแวดล้อมของยานพาหนะ การตรวจจับสิ่งกีดขวางสามารถทำได้ 2 วิธี: การตรวจจับด้วยแสงโดยใช้เซ็นเซอร์เลเซอร์ หรือการตรวจจับด้วยกันชนเชิงกลโดยใช้เซ็นเซอร์แรงกด มาตรฐานความปลอดภัย ANSI/ITSDF B56.5-2012 ใช้เป็นแนวทางสำหรับข้อกำหนดการทำงานของ AGV/AMR นอกจากนี้ อุปกรณ์ตรวจวัดการป้อนกลับ เช่น เอ็นโค้ดเดอร์ (encoders) รีโซลเวอร์ (resolvers) หรือฮอลล์เซ็นเซอร์ (hall-effect sensors) ถูกใช้ในการคำนวณระยะทางที่เดินทางรวมถึงยืนยันความเร็วของยานพาหนะ
4. การเคลื่อนไหวใดๆ ที่อยู่ภายนอกระบบขับเคลื่อนจะถูกจำแนกเป็น กลไกรอบนอก (Peripheral Mechanisms) โดยยานพาหนะส่วนใหญ่อาจมีระบบกลไกยกเพื่อยกโหลด และอาจมีระบบป้อนถาด ประตู หรือแขนกล ซึ่งถูกควบคุมด้วยมอเตอร์หรือตัวขับเคลื่อน
5. ระบบขับเคลื่อน (Drivetrain) ประกอบด้วยเพลาขับ ล้อ มอเตอร์ไฟฟ้า และชุดเกียร์ ส่วนประกอบเหล่านี้ทำหน้าที่เคลื่อนที่และบังคับทิศทางยานพาหนะ ทิศทางของยานพาหนะโดยทั่วไปถูกควบคุมผ่านการหมุนแบบซิงโครไนซ์หรือแบบอิสระของล้อ
การออกแบบระบบขับเคลื่อน (Drivetrain Design)
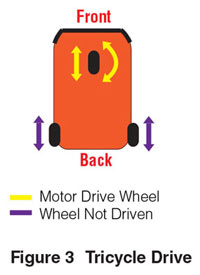
ระบบขับเคลื่อนแบบสามล้อ (Tricycle Drive) เป็นการออกแบบระบบขับเคลื่อนที่พบได้บ่อยที่สุด โดยใช้ล้อขับเคลื่อน 1 ล้อ และล้อที่ไม่ได้ขับเคลื่อนอีก 2 ล้อ จัดเรียงในรูปแบบสามเหลี่ยม ล้อขับเคลื่อนด้านหน้าที่มีเพียงล้อเดียวทำหน้าที่ทั้งในการบังคับทิศทางและขับเคลื่อนยานพาหนะ โดยต้องใช้มอเตอร์เกียร์หนึ่งตัวในการหมุนล้อขับเคลื่อน และอีกมอเตอร์หนึ่งในการบังคับทิศทางการออกแบบล้อทั้ง 3 ล้อในรูปแบบนี้ให้ความคล่องตัวเพียงพอสำหรับการใช้งาน AGV/AMR ส่วนใหญ่
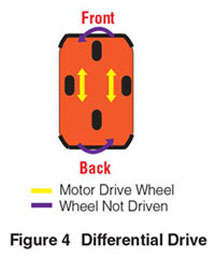
ระบบขับเคลื่อนแบบดิฟเฟอเรนเชียล (Differential Drive) ใช้หลักการปรับความเร็วและทิศทางของล้อขับเคลื่อนทั้ง 2 ล้อเพื่อบังคับทิศทางยานพาหนะ โดยระบบนี้ประกอบด้วยมอเตอร์เกียร์ 2 ตัวสำหรับล้อขับเคลื่อน ข้อดีของระบบนี้คือมีความคล่องตัวสูงมาก เนื่องจากสามารถหมุนรอบศูนย์กลางของยานพาหนะได้ แต่ตำแหน่งเชิงมุมอาจไม่แม่นยำเท่าที่ควร
ระบบขับเคลื่อนแบบควอดไดรฟ์ (Quad Drive) ระบบขับเคลื่อนแบบสี่ล้อใช้มอเตอร์บังคับทิศทาง 2 ตัว และมอเตอร์ขับเคลื่อน 2 ตัว ระบบนี้มีความคล่องตัวสูงมากเช่นกัน แต่มีความซับซ้อนมากกว่าการจัดวางระบบขับเคลื่อนแบบอื่น ยานพาหนะสามารถเคลื่อนที่รอบแกนกลางและเคลื่อนที่ด้านข้างได้ด้วย

ข้อที่ 3: ทำไมต้องเลือกมอเตอร์ DC แบบไร้แปรงถ่าน (Brushless DC Motors)?
เป็นมิตรต่อแบตเตอรี่ และ การกระจายความร้อนที่ดียิ่งขึ้น
แบตเตอรี่แรงดันไฟฟ้ากระแสตรง (DC Voltage) ซึ่งเหมาะสมอย่างยิ่งสำหรับการใช้งานกับ DC มอเตอร์ โดยทั่วไปแบตเตอรี่แรงดัน 24VDC หรือ 48VDC มักถูกนำมาใช้ ซึ่งสามารถทำงานร่วมกับมอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC Motors) ได้อย่างง่ายดาย
อุณหภูมิการทำงานที่สูงเป็นปัจจัยที่ต้องพิจารณาสำหรับส่วนประกอบที่ไวต่อความร้อนใน AGV/AMR เมื่อเปรียบเทียบกับมอเตอร์กระแสตรงแบบแปรงมีถ่าน (Brushed DC Motors) มอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC Motors) มีการกระจายความร้อนที่ดีกว่า เนื่องจากขดลวดมักจะอยู่ด้านนอกของโรเตอร์ อุณหภูมิการทำงานที่ต่ำกว่าสามารถช่วยยืดอายุการใช้งานและรอบการทำงานของมอเตอร์ได้ ทางเลือกอื่นๆ ได้แก่ สเต็ปเปอร์มอเตอร์ (stepper motors) และเซอร์โวมอเตอร์ (servo motors) อย่างไรก็ตาม สเต็ปเปอร์มอเตอร์แบบทั่วไปมักจะสร้างความร้อนค่อนข้างมาก และประสิทธิภาพของเซอร์โวมอเตอร์มาพร้อมกับต้นทุนที่สูงกว่า
การออกแบบกะทัดรัด (Compact Design)
การลดพื้นที่ติดตั้งของส่วนประกอบและตัวรถเป็นสิ่งสำคัญสำหรับการใช้งานในพื้นที่จำกัด ขนาดที่กะทัดรัดของมอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC Motors) จึงเป็นตัวเลือกที่น่าสนใจสำหรับนักออกแบบ AGV/AMR
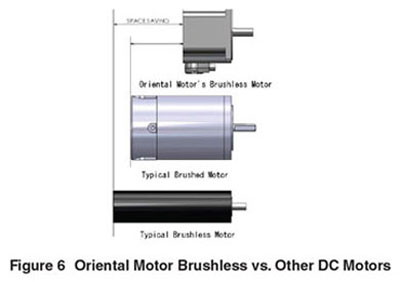
Oriental Motor เป็นผู้นำในอุตสาหกรรมด้วยการนำเสนอมอเตอร์เกียร์แบบไร้แปรงถ่านในเคสที่กะทัดรัดและไม่เหมือนใคร โดยความยาวที่สั้นลงและเคสมอเตอร์ที่กว้างขึ้นช่วยให้สามารถติดตั้งโรเตอร์ที่มีขนาดใหญ่ขึ้น ซึ่งมีแรงเฉื่อยสูงขึ้น ทำให้มอเตอร์สามารถรองรับการใช้งานที่ต้องการรับโหลดสูงได้ดีกว่ามอเตอร์ไร้แปรงถ่านแบบทรงกระบอกยาวทั่วไป นอกจากนี้ ความยาวของมอเตอร์ยังลดลงเมื่อเทียบกับมอเตอร์แบบมีแปรงถ่าน (ดูรูปที่ 6)
ไม่มีการบำรุงรักษาหรือการเกิดประกายไฟ
เพื่อจำกัดเวลาหยุดทำงานของ AGV/AMR, มอเตอร์ไร้แปรงถ่าน (Brushless DC Motors) จึงมีข้อได้เปรียบเหนือกว่ามอเตอร์แบบมีแปรงถ่าน (Brushed DC Motors) เนื่องจากไม่ต้องการการบำรุงรักษาแปรงถ่าน แปรงถ่านจะสึกหรอตามการใช้งานและต้องเปลี่ยนใหม่เป็นระยะ ๆ แต่ในมอเตอร์ไร้แปรงถ่านจะไม่มีแปรงถ่านในการสื่อสารไฟฟ้า จึงมีอายุการใช้งานที่ยาวนานกว่า ข้อดีนี้ช่วยลดค่าใช้จ่ายในการบำรุงรักษามอเตอร์และลดเวลาหยุดทำงาน นอกจากนี้ เนื่องจากไม่มีฝุ่นจากแปรงถ่านและปัญหาการเกิดประกายไฟ มอเตอร์ไร้แปรงถ่านจึงสามารถใช้งานได้ในสภาพแวดล้อมที่หลากหลายมากกว่ามอเตอร์แบบมีแปรงถ่าน โดยการใช้ตัวขับมอเตอร์ในการสื่อสารไฟฟ้ากับขดลวดแทนแปรงถ่าน มอเตอร์ไร้แปรงถ่ายยังสามารถลดการรบกวนทางไฟฟ้าและเสียงดังที่เกิดขึ้นเมื่อเทียบกับมอเตอร์แบบมีแปรงถ่าน (Brushed DC Motors)
ช่วงความเร็วกว้าง, แรงบิดคงที่, ลักษณะการทำงานต่อเนื่อง พร้อมประสิทธิภาพแบบ Closed Loop
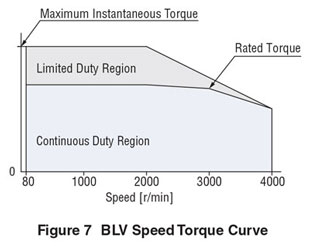
เมื่อเคลื่อนย้ายวัตถุจากจุด A ไป B, AGV/AMR จะทำงานและขนส่งสินค้าอย่างต่อเนื่อง เพื่อให้สามารถรับน้ำหนักบรรทุกสูงสุดที่ความเร็วต่างๆ มอเตอร์จะต้องสามารถรองรับความเร็วที่หลากหลายที่แรงบิดคงที่ได้ ช่วงความเร็วที่กว้างและคุณลักษณะแรงบิดที่สม่ำเสมอของมอเตอร์แบบไร้แปรงถ่าน ช่วยให้มีความยืดหยุ่นสูงสุดในการออกแบบ มอเตอร์ไร้แปรงถ่านสามารถทำงานได้อย่างต่อเนื่องเนื่องจากมีประสิทธิภาพสูง สามารถทำงานได้อย่างต่อเนื่องโดยไม่ต้องใช้แผงระบายความร้อนเพิ่มเติม ซึ่งช่วยเพิ่มผลผลิตได้ เส้นโค้งแรงบิดของมอเตอร์ไร้แปรงถ่านแสดงในรูปที่ 7
ประสิทธิภาพของมอเตอร์ไร้แปรงถ่าน (Brushless DC Motor) แบบ Closed-loop มักทำได้โดยการใช้ข้อมูลป้อนกลับจากฮอลล์เซ็นเซอร์ (hall-effect sensors) ซึ่งติดตั้งอยู่ภายในส่วนหลังของมอเตอร์ เซ็นเซอร์เหล่านี้จะส่งสัญญาณไปยังตัวขับมอเตอร์ไร้แปรงถ่านเพื่อควบคุมความเร็ว สำหรับมอเตอร์ไร้แปรงถ่านของ Oriental Motor ความละเอียดพื้นฐานของการป้อนกลับอยู่ที่ 30 พัลส์ต่อการหมุนหนึ่งรอบ (PPR) ตัวขับสามารถควบคุมความเร็วได้โดยมีความผันผวนเพียง +/- 0.5% ซึ่งถือว่าเป็นความแม่นยำในระดับเดียวกับเซอร์โวมอเตอร์ (Servo Grade Accuracy)
การตอบสนองของมอเตอร์สำหรับการควบคุมโซน
การควบคุมโซนต้องอาศัยการตรวจจับวัตถุในระยะโซนต่างๆ เพื่อกำหนดพฤติกรรมการเตือนหรือหยุด เมื่อมีสิ่งกีดขวางอยู่ในโซนเตือนระยะใกล้ของยานพาหนะ แนะนำให้ยานพาหนะลดความเร็วลงและส่งสัญญาณเตือนเพื่อแจ้งให้บุคลากรทราบ และเมื่อสิ่งกีดขวางอยู่ในโซนหยุดที่ใกล้กับยานพาหนะที่สุด ยานพาหนะควรหยุดทันที ทั้งนี้สามารถปรับแต่งการตรวจจับโซนเพิ่มเติมตามความต้องการได้
เพื่อให้สามารถตรวจจับโซนได้ ตัวเลือกหนึ่งคือการใช้ข้อมูลย้อนกลับ (Feedback) มอเตอร์ขับเคลื่อนจำเป็นต้องมีความละเอียดของข้อมูลย้อนกลับเพียงพอ เพื่อให้สามารถตรวจจับโซนต่างๆ ได้อย่างรวดเร็วภายในแผนที่ ข้อมูลย้อนกลับของมอเตอร์ เช่น ฮอลล์ IC เซ็นเซอร์ (hall-effect sensor IC) สามารถให้พัลส์ดิจิทัลกลับไปยังไดรเวอร์เพื่อการติดตาม โดยความละเอียดมาตรฐานของข้อมูลย้อนกลับที่ 30 พัลส์ต่อการหมุนหนึ่งรอบ (PPR) ที่เพลาของมอเตอร์สามารถเพิ่มขึ้นได้ตามอัตราทดของเกียร์ ในการใช้งาน AGV หรือ AMR ทั่วไปซึ่งต้องการแรงบิดสูงและความเร็วต่ำ มักจะเลือกใช้อัตราทดเกียร์ที่สูงสำหรับมอเตอร์เกียร์ ในตัวอย่างถัดไป เราจะแสดงวิธีการแปลงความละเอียดของข้อมูลย้อนกลับจากเพลามอเตอร์ไปยังล้อขับเคลื่อน.
ข้อมูลจำเพาะ:
30 พัลส์ต่อรอบ (ที่มอเตอร์)
อัตราทดเกียร์ 50:1
ล้อขับเคลื่อนเส้นผ่านศูนย์กลาง 10 นิ้ว
การแปลงค่า:
1. แปลงจากความละเอียดพัลส์ของเพลามอเตอร์เป็นความละเอียดพัลส์ของเพลาเกียร์:
30 พัลส์ต่อรอบ (PPR) x อัตราทดเกียร์ 50:1 = 1500 พัลส์ต่อรอบ
2. แปลงความละเอียดของเพลาเกียร์เป็นองศาต่อพัลส์:
360 องศา / 1500 พัลส์ต่อรอบ = 0.24 องศาต่อพัลส์
3. แปลงจากองศาต่อพัลส์เป็นระยะเชิงเส้นต่อพัลส์:
(10 นิ้ว x Π) / 1500 พัลส์ต่อรอบ = 0.02 นิ้วต่อพัลส์
ในกรณีส่วนใหญ่ ความละเอียดเชิงเส้นของล้อขับเคลื่อนที่ 0.02 นิ้วเพียงพอสำหรับการตรวจจับโซนเพื่อควบคุมการทำงาน
เมื่อหยุด AGV/AMR ยังมีปัจจัยอื่นที่ต้องพิจารณา เช่น ระยะลื่นไถล (Overrun) ระยะลื่นไถลของมอเตอร์แบบ Brushless ที่ความเร็ว 2500 RPM จะอยู่ที่ประมาณ 2.6 รอบที่เพลามอเตอร์ เมื่อทำงานภายใต้แรงเฉื่อยของโหลดที่อนุญาต สำหรับล้อขับเคลื่อนขนาดเส้นผ่านศูนย์กลาง 10 นิ้ว และเกียร์มอเตอร์อัตราทด 50:1 จะมีระยะลื่นไถลเท่ากับ 1.63 นิ้วหลังจากได้รับคำสั่งหยุด
(2.6 รอบ / อัตราทดเกียร์ 50:1) x 10 นิ้ว x Π = 1.63 นิ้ว
ระยะลื่นไถลจะแตกต่างไปตามความเร็ว แรงเฉื่อยของโหลด และขนาดของมอเตอร์
ระบบเบรกแบบบูรณาการ (Integrated Braking)
มาตรฐาน ANSI/ITSDF B56.5-2012 กำหนดข้อกำหนดเกี่ยวกับเบรกฉุกเฉิน เบรกจอด และเบรกสำหรับการใช้งานบน AGV/AMR โดยทั่วไป ตัวกระตุ้นแบบไฮดรอลิกหรือแบบนิวแมติกมักถูกนำมาใช้ในระบบเบรกฉุกเฉิน อย่างไรก็ตาม มอเตอร์ที่ติดตั้งเบรกแม่เหล็กไฟฟ้าสามารถตอบสนองความต้องการบางส่วนเหล่านี้ได้เช่นกัน เบรกแม่เหล็กไฟฟ้าประเภทที่ทำงานเมื่อไม่มีไฟฟ้าจะใช้แรงเสียดทานในการหยุดและยึดแกนมอเตอร์ให้อยู่กับที่ ซึ่งเหมาะอย่างยิ่งสำหรับการใช้งานเป็นเบรกจอดรถ นอกจากนี้ ในหลายกรณี มอเตอร์และไดรเวอร์ยังมีฟังก์ชันเบรกแบบไดนามิก (Dynamic Braking) ซึ่งเป็นการหยุดมอเตอร์โดยทันทีโดยการตัดกระแสไฟฟ้าและลัดวงจรทุกเฟสเข้าด้วยกัน ส่งผลให้แกนมอเตอร์ถูกล็อกและไม่สามารถหมุนได้ การผสานการทำงานระหว่างเบรกแบบไดนามิกในระหว่างการลดความเร็ว (Deceleration) และเบรกแม่เหล็กไฟฟ้าสามารถนำมาใช้เพื่อตอบสนองความต้องการของระบบเบรกสำหรับการใช้งานทั่วไปได้อย่างมีประสิทธิภาพ
เนื่องจากแรงเสียดทานสามารถทำให้เบรกสึกหรอได้ จึงแนะนำให้ใช้เบรกไดนามิกเพื่อหยุดมอเตอร์ก่อน แล้วจึงเปิดใช้งานเบรกแม่เหล็กไฟฟ้าเพื่อจอด AGV/AMR การเลือกใช้มอเตอร์สำเร็จรูปที่มาพร้อมกับเบรกแม่เหล็กไฟฟ้าในตัว ช่วยรับประกันประสิทธิภาพการทำงานและลดระยะเวลาในการจัดส่งสินค้า อีกทั้งยังช่วยลดเวลาที่ใช้ในการติดตั้งและทดสอบ เนื่องจากสเปกของมอเตอร์ได้ผ่านการทดสอบและรับรองจากผู้ผลิตล่วงหน้าแล้ว
ข้อที่ 4: ตัวเลือกระบบเกียร์ (Gearing Options)
ความหลากหลายของเพลา เกียร์ และรูปแบบการติดตั้ง
การเลือกหัวเกียร์ที่เหมาะสมถือเป็นอีกหนึ่งการตัดสินใจสำคัญสำหรับการออกแบบระบบส่งกำลังที่ประสบความสำเร็จ หัวเกียร์มีหลากหลายประเภทในตลาดที่เสนอรูปแบบต่างๆ รวมถึงเพลาแบบตันหรือกลวง และเกียร์แบบเฟืองตรง (spur gear), เฟืองตัวหนอน (worm gear), เฟืองเฉียง (helical gear) หรือเฟืองไฮพอยด์ (hypoid gear) ประเภทของเพลามีผลต่อการออกแบบระบบส่งกำลัง ในขณะที่ประเภทของเกียร์มีผลต่อประสิทธิภาพการทำงาน ตัวอย่างเช่น หัวเกียร์เพลากลวงสามารถช่วยลดพื้นที่การติดตั้งได้โดยไม่ต้องใช้ข้อต่อ การเกิดระยะฟรีของเกียร์ (gear backlash) อาจมีผลต่อการตรวจจับโซนในกรณีที่ต้องการการทำงานสองทิศทาง และประสิทธิภาพของเกียร์ (gear efficiency) อาจมีผลต่อความสามารถในการรองรับน้ำหนักบรรทุก (payload capacity)
นอกจากเพลาและเกียร์แล้ว ประเภทของการติดตั้งและทิศทางการติดตั้งของหัวเกียร์ก็เป็นสิ่งที่ต้องพิจารณาทิศทางการติดตั้งสามารถเป็นแบบขนาน (parallel) หรือมุมฉาก (right angle) และประเภทของการติดตั้งสามารถเป็นแบบติดตั้งด้วยฐาน (foot mount) หรือแบบติดตั้งด้วยหน้าแปลน (flange mount) หัวเกียร์แบบติดตั้งด้วยฐานช่วยลดความจำเป็นในการซื้อหรือสร้างขาเหล็กสำหรับติดตั้ง ในขณะที่หัวเกียร์แบบติดตั้งด้วยหน้าแปลนสามารถช่วยลดพื้นที่การติดตั้ง (footprint) ได้
ผู้ออกแบบต้องเลือกประเภทของหัวเกียร์ที่เหมาะสมกับการออกแบบระบบขับเคลื่อน (drivetrain) และให้ประสิทธิภาพที่จำเป็น ในกรณีส่วนใหญ่ การใช้เกียร์ชนิดสเปอร์ (spur), เฮลิคอล (helical) หรือไฮพอยด์ (hypoid) จะเพียงพอ ส่วนเกียร์แบบเกลียวหนอน (worm gears) ที่มีประสิทธิภาพต่ำไม่แนะนำสำหรับงานที่มีภาระหนัก (high load applications) เช่นเดียวกับการเลือกมอเตอร์และเกียร์ที่มีเบรคในตัว การซื้อมอเตอร์และการประกอบเกียร์จากผู้ผลิตเดียวกันจะช่วยรับประกันสเปคที่ตรงตามความต้องการและช่วยประหยัดเวลา

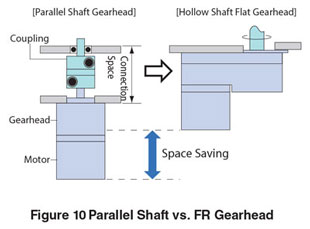
หัวเกียร์ Parallel Hollow Shaft Flat (FR) แบบประหยัดพื้นที่
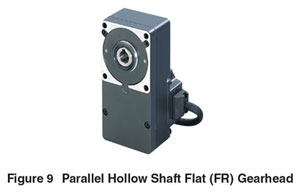
หัวเกียร์แบบ Hollow Shaft Flat เป็นตัวเลือกที่ได้รับความนิยมสำหรับการออกแบบ AGV/AMR โดยปกติแล้วหัวเกียร์แบบ Hollow Shaft ส่วนใหญ่จะเป็นแบบมุมขวา (right-angle) แต่ Oriental Motor ได้นำเสนอการรวมกันของมอเตอร์และเกียร์ที่ไม่เหมือนใคร ซึ่งเป็นหัวเกียร์แบบขนานแบน (parallel flat style) ที่ออกแบบมาเพื่อประหยัดพื้นที่ เสริมแรงบิดสูง และสามารถขับเคลื่อนย้อนกลับได้หากจำเป็น ซึ่งสามารถพบได้ในซีรีส์ BLV และ BLH หัวเกียร์แบบ Parallel Hollow Shaft Flat (FR) แบนนี้สามารถติดตั้งเพลาขับและล้อได้จากทั้งสองด้าน นอกจากนี้ยังช่วยลดเวลาในการประกอบและต้นทุนแรงงานโดยการลดส่วนประกอบที่จำเป็นในการประกอบ เช่น ข้อต่อ, รอก หรือสายพานที่ใช้เชื่อมต่อเพลาของเกียร์กับเพลาขับ (ดูรูปที่ 10)
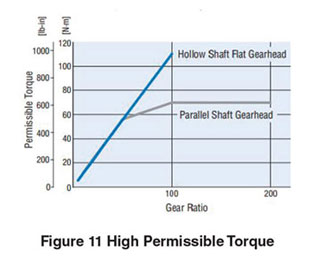
รองรับแรงบิดได้สูง
หัวเกียร์แบบ FR เหล่านี้มีแรงบิดที่ยอมรับได้สูงกว่าและไม่อิ่มตัวเมื่อเทียบกับหัวเกียร์แบบเพลาขนาน (parallel shaft gearheads) (ดูรูปที่ 11) โดยตัวเรือนของหัวเกียร์ FR ถูกออกแบบให้มีความแข็งแรงมากขึ้น และการจัดวางในแนวยาวช่วยให้สามารถใช้เฟืองขนาดใหญ่ขึ้นได้ การเปลี่ยนแปลงทั้งสองอย่างนี้นำไปสู่การเพิ่มแรงบิดที่ยอมรับได้ พื้นที่เพิ่มเติมในหัวเกียร์ FR ยังช่วยให้สามารถใช้ตลับลูกปืนขนาดใหญ่ขึ้น ซึ่งส่งผลให้สามารถรับแรงในแนวรัศมีได้มากขึ้นและเพิ่มอายุการใช้งานของหัวเกียร์ การออกแบบชุดเกียร์นี้ยังมีคุณสมบัติลดเสียงรบกวน เนื่องจากการตกแต่งพื้นผิวของเพลาฟันเฟืองมอเตอร์อย่างประณีต คุณสมบัติเหล่านี้ช่วยให้ AGV/AMR ทำงานได้อย่างเงียบ ลดเสียงรบกวน พร้อมทั้งเพิ่มความสามารถในการรับน้ำหนักและยืดอายุการใช้งาน
ข้อที่ 5: ไดรเวอร์มอเตอร์แบบไร้แปรงถ่าน (Brushless Motor Drivers)
ใช้งานง่ายและยืดหยุ่น
เนื่องจากมีผู้ปฏิบัติงานหลายคนที่ต้องรู้วิธีใช้งาน ควบคุม หรือโปรแกรมยานพาหนะอัตโนมัติเหล่านี้ การควบคุมต้องใช้งานง่าย ฟังก์ชันการใช้งานแบบ Plug & Play เป็นคุณสมบัติที่น่าสนใจสำหรับตัวควบคุมมอเตอร์ไร้แปรงถ่าน (มักเรียกว่าตัวขับมอเตอร์) โดยบางรุ่นมีฟังก์ชันการปรับแต่ง I/O สำหรับการใช้งานเฉพาะ
การควบคุมความเร็วและทิศทางของมอเตอร์ต้องมีความยืดหยุ่นและง่ายต่อการใช้งานเพื่อให้สามารถลดระยะเวลาในการพัฒนาทางวิศวกรรมได้ ยานพาหนะอัตโนมัติบางรุ่นใช้สัญญาณอินพุตอนาล็อก (I/O) เช่น โพเทนชิโอมิเตอร์ (potentiometer) หรือแรงดันไฟฟ้าอนาล็อก 0~10 VDC ที่ส่งเข้าภายนอก ในขณะที่บางรุ่นใช้ข้อมูลความเร็วที่เก็บไว้ซึ่งสามารถโปรแกรมดิจิตอลบนตัวขับหรือผ่านเครือข่าย fieldbus ในอุตสาหกรรม คุณสมบัติเหล่านี้มีในตัวขับที่พร้อมใช้งานจากโรงงานและตอบโจทย์ข้อกังวลเรื่องความยืดหยุ่นและการใช้งานที่ง่าย
ฟังก์ชันที่เป็นประโยชน์สำหรับ AGV/AMR
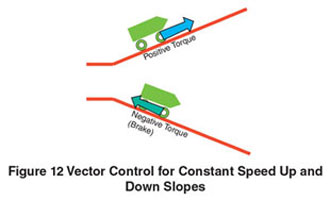
การควบคุมเวกเตอร์ (Vector control) เป็นฟีเจอร์ที่มีในตัวซึ่งใช้สำหรับการทำงานบนทางลาด โดยการรักษาความเร็วให้คงที่ นี่เป็นคุณสมบัติที่สำคัญและเป็นประโยชน์ในการรับรองว่า AGV/AMR สามารถบรรทุกได้ที่ความเร็วคงที่ขึ้นและลงทางลาดได้อย่างมีประสิทธิภาพ
เมื่อเคลื่อนที่บนทางลาด หนึ่งในปัญหาที่พบคือแรงเคลื่อนไฟฟ้าย้อนกลับ (Back EMF หรือ Back Electromotive Force) ซึ่งเกิดขึ้นเมื่อมอเตอร์ถูกขับย้อนกลับโดยแรงภายนอก เช่น แรงโน้มถ่วง ปรากฏการณ์นี้ทำให้มอเตอร์สร้างแรงดันไฟฟ้าและส่งกลับไปยังวงจรไดรเวอร์โดยตรง นอกจากนี้ Back EMF ยังสามารถเกิดขึ้นได้เมื่อมีการผลัก AGV/AMR ที่ไม่ได้เปิดใช้งานพลังงาน หรือหยุดกะทันหันขณะมีโหลดที่มีแรงเฉื่อยสูง หากไม่มีการจัดการ Back EMF อย่างเหมาะสม อาจทำให้เกิดความเสียหายต่อผลิตภัณฑ์ หากจำเป็น วิธีลดผลกระทบของ Back EMF คือการตั้งโปรแกรมให้มีระยะเวลาชะลอการหยุด (Deceleration Time) ที่นานขึ้น หรือเพิ่มฟังก์ชันในไดรเวอร์ที่ทำให้การตอบสนองของมอเตอร์ล่าช้าออกไป
มีฟังก์ชัน เช่น โหมดการตอบสนองความเร็ว (speed response modes) เพื่อช่วยลดผลกระทบของแรงเคลื่อนไฟฟ้ากลับ (Back EMF) การหน่วงเวลาการตอบสนองต่ำ จะทำให้มอเตอร์ตอบสนองช้าลง โดยใช้ตัวกรองหน่วงเวลาหลักกับข้อมูลคำสั่งความเร็ว ซึ่งใช้ภายในไดรเวอร์ ฟังก์ชันนี้ช่วยให้มอเตอร์ตอบสนองช้าลง เพื่อช่วยลดแรงเคลื่อนไฟฟ้ากลับที่เกิดขึ้น
ฟังก์ชันการตรวจสอบช่วยลดเวลาหยุดทำงาน
การเฝ้าติดตามสภาพของมอเตอร์และตัวขับเคลื่อนในยานพาหนะช่วยให้สามารถบำรุงรักษาเชิงป้องกันและสามารถขจัดเวลาสูญเสียได้ เมื่อมีการเตือนสำหรับมอเตอร์ มอเตอร์มักจะหยุดทำงานจนกว่าปัญหาจะได้รับการแก้ไข สิ่งสำคัญคือต้องทราบถึงปัญหาที่อาจเกิดขึ้นก่อนที่การเตือนเหล่านี้จะถูกกระตุ้น และนี่คือจุดที่การเฝ้าติดตามเข้ามามีบทบาท เพื่อให้สิ่งนี้เกิดขึ้นได้ จำเป็นต้องมีระบบวงจรปิดที่มีการป้อนกลับของมอเตอร์ ข้อมูลสถานะของทั้งมอเตอร์และตัวขับเคลื่อนจำเป็นต้องถูกส่งต่อไปยังตัวควบคุมหลัก สิ่งนี้สามารถทำได้ด้วย PLC ผ่านทาง I/O หรือผ่านเครือข่าย fieldbus ในอุตสาหกรรม เช่น Modbus RTU หรือ EtherCAT
ระบบมอเตอร์และไดรเวอร์บางรุ่นสามารถให้ข้อมูลย้อนกลับเกี่ยวกับอุณหภูมิและระยะทางการใช้งาน เพื่อช่วยป้องกันปัญหาก่อนที่จะเกิดขึ้นได้ ในบางกรณี สัญญาณเตือนสามารถถูกส่งออกจากไดรเวอร์มอเตอร์ก่อนที่สัญญาณแจ้งเตือนจะถูกกระตุ้นจริง ซึ่งช่วยเปิดโอกาสให้ผู้ปฏิบัติงานสามารถแก้ไขปัญหาได้อย่างรวดเร็ว ก่อนที่ยานพาหนะจะหยุดทำงาน
ข้อที่ 6: สรุป
ใช้งานง่ายและยืดหยุ่น
เมื่อพิจารณาการออกแบบระบบขับเคลื่อนของ AGV/AMR สิ่งสำคัญคือต้องเข้าใจถึงตัวเลือกที่มีอยู่และข้อดีของเกียร์มอเตอร์แบบไร้แปรงถ่าน (Brushless DC Gearmotors)
มอเตอร์ไร้แปรงถ่าน (Brushless DC Motors) มีขนาดกะทัดรัด ช่วงความเร็วที่กว้าง และประสิทธิภาพแรงบิดที่เสถียร สามารถจับคู่กับตัวเลือกเกียร์ที่หลากหลาย เช่น เกียร์ FR พร้อมกับไดรเวอร์ประสิทธิภาพสูง เพื่อเพิ่มฟังก์ชันของระบบขับเคลื่อน AGV/AMR ให้ดียิ่งขึ้น มอเตอร์ไร้แปรงถ่านยังเป็นทางออกในระยะยาวเมื่อเปรียบเทียบกับมอเตอร์แบบมีแปรงถ่าน (Brushed Motors) และเป็นทางเลือกที่คุ้มค่ากว่าเมื่อเทียบกับมอเตอร์เซอร์โว (Servo Motors)
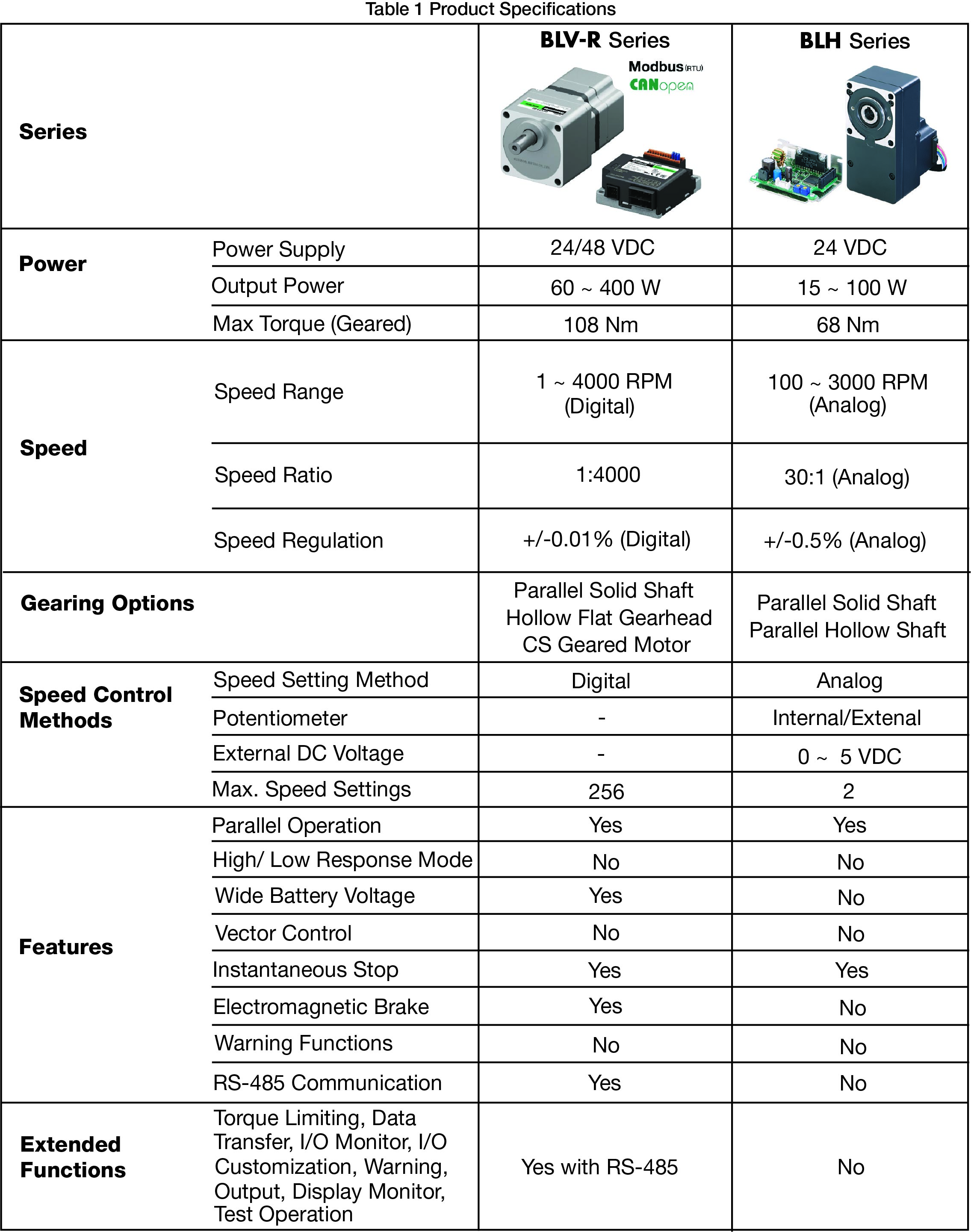
ข้อได้เปรียบที่เป็นเอกลักษณ์ของ Oriental Motor ในการนำเสนอมอเตอร์เกียร์แบบประกอบสำเร็จ เบรก ระบบป้อนกลับ และตัวขับเคลื่อนเฉพาะ สามารถช่วยลดเวลาในการพัฒนาผลิตภัณฑ์และรับประกันข้อกำหนดทางเทคนิค ซีรี่ส์ BLV กำลังสูงได้รับการออกแบบมาสำหรับ AGV/AMR ส่วนซีรี่ส์ BLH แบบกะทัดรัดเป็นอีกหนึ่งทางเลือกสำหรับกระแสตรง ในขณะที่ซีรี่ส์ BLH ได้รับการออกแบบมาสำหรับการใช้งานทั่วไป ซีรี่ส์ BLV ได้รับการออกแบบมาโดยคำนึงถึง AGV/AMR โดยเฉพาะ หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับไลน์อัพมอเตอร์เกียร์ไร้แปรงกระแสตรง 24/48 โวลต์ของเรา โปรดดูตารางด้านล่างนี้
สำหรับรายละเอียดเพิ่มเติมเกี่ยวกับฟังก์ชันเฉพาะสำหรับ AGV/AMR ที่มีในซีรี่ส์ BLV กรุณาอ่านเอกสารทางเทคนิค "10 คุณสมบัติมาตรฐานสำหรับการใช้งานระบบส่งกำลังใน AGV/AMR"
เราพร้อมให้ข้อมูลทางเทคนิคและคำปรึกษาจากผู้เชี่ยวชาญ เพื่อช่วยให้คุณได้รับการสนับสนุนที่ดีที่สุด หากคุณต้องการความช่วยเหลือหรือข้อมูลเพิ่มเติม สามารถติดต่อเราได้ที่ลิงก์ด้านล่าง