การเสนอวิธีแก้ปัญหาสำหรับหุ่นยนต์ขนส่ง

อุตสาหกรรมทั้งหมดกำลังเผชิญกับปัญหาขาดแคลนแรงงานเนื่องจากอัตราการเกิดที่ลดลงและประชากรที่สูงวัย ขณะเดียวกันการเว้นระยะห่างทางสังคมก็เป็นปัญหาเพื่อป้องกันการแพร่กระจายของ COVID-19 ในบริบทนี้ บริษัทต่าง ๆ กำลังเร่งพยายามในการทำให้เป็นอัตโนมัติและลดจำนวนแรงงานใน "งานขนส่งสินค้า" ซึ่งค่อนข้างง่าย การนำหุ่นยนต์ขนส่ง (AGV/AMR/GTP*) มาใช้ถูกเสนอเป็นทางออกสำหรับปัญหานี้
มอเตอร์ไร้แปรงถ่าน BLVR ซีรีส์ และ BLH ซีรีส์ สามารถขับเคลื่อนด้วยแบตเตอรี่ได้ ดังนั้นจึงสามารถใช้ติดตั้งบนเพลาของหุ่นยนต์ขนส่งหรืออุปกรณ์ขนส่งได้
มีส่วนช่วยในการรองรับรูปแบบการเดินทางและโหลดที่หลากหลายตามความต้องการของแต่ละสาขา
- *AGV: รถยนต์อัตโนมัติเส้นทาง AMR: หุ่นยนต์เคลื่อนที่อัตโนมัติ GTP: สินค้าสู่บุคคล
พื้นที่ว่างด้านล่างต่ำและดีไซน์เพรียวบาง: ตัวเครื่องสามารถนำไปใช้งานได้กับสินค้าหลากหลายรูปแบบ
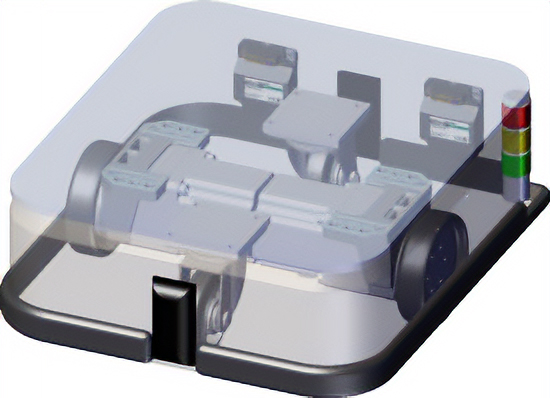
การขนส่งอัตโนมัติโดยเคลื่อนที่ใต้รถเข็นหรือชั้นวาง: การออกแบบที่มีระยะห่างต่ำ
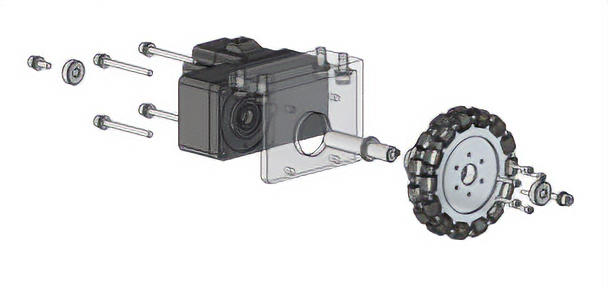
หุ่นยนต์ขนส่งที่มีระยะห่างต่ำมีประสิทธิภาพในการดำเนินการขนส่งแบบอัตโนมัติ เนื่องจากสามารถเคลื่อนที่ใต้ชั้นวางผลิตภัณฑ์/ชิ้นส่วนและรถเข็นตะกร้าเพื่อยก (หรือล็อค) ได้ มอเตอร์สามารถติดตั้งได้ทั้งด้านบนหรือด้านข้าง ซึ่งช่วยให้มีความยืดหยุ่นในการออกแบบมากขึ้นและส่งเสริมการออกแบบที่มีความสูงต่ำ
-
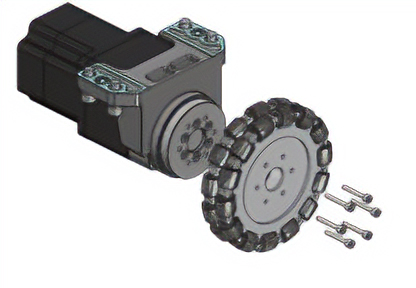
อะแดปเตอร์ขับเคลื่อนแบบติดตั้งด้านบน

-
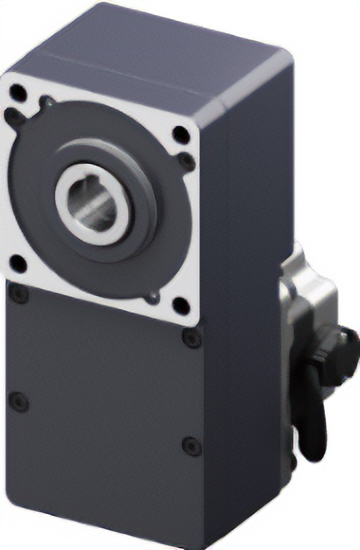
หัวเกียร์แบนเพลากลวงติดตั้งด้านข้าง
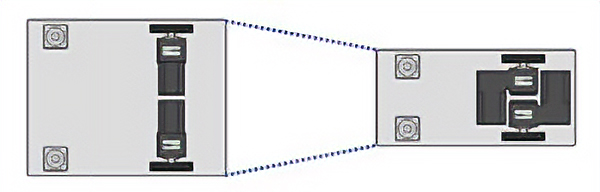
การเคลื่อนผ่านช่องแคบ: ดีไซน์เพรียวบาง
การจัดเรียงหัวเกียร์แบนเพลากลวงที่ตัดกันช่วยลดระยะห่างระหว่างล้อ ซึ่งทำให้สามารถออกแบบให้บางลงและลดความกว้างของรถยนต์ได้ สิ่งนี้ช่วยให้หุ่นยนต์ขนส่งสามารถผ่านกันได้แม้ในทางเดินแคบ ลดเวลารอของหุ่นยนต์ขนส่ง และช่วยเพิ่มอัตราการทำงานให้ดีขึ้น
ต่ำลงและเพรียวบางกว่าเดิม
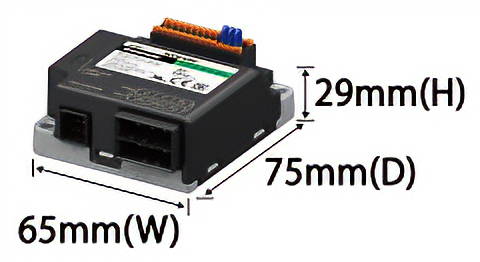
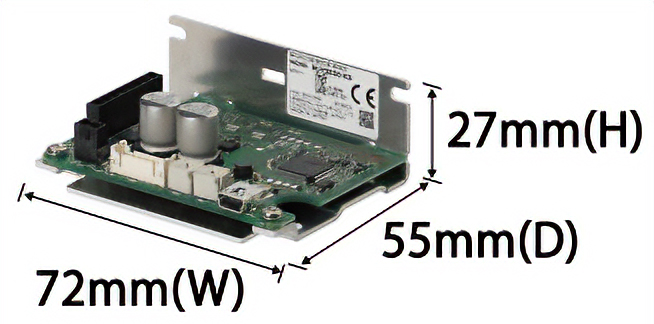
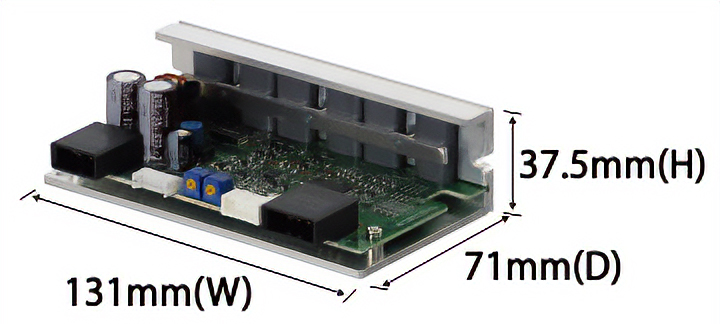
ไดรเวอร์ที่แบนและกะทัดรัด
ขนาดที่กะทัดรัดช่วยขยายความยืดหยุ่นในการจัดวางตำแหน่งของแบตเตอรี่, อุปกรณ์ควบคุม, และอื่น ๆ
-
BLV Series R type
60 W, 100 W,
200 W, 400 W -
BLH Series
15 W, 30 W, 50 W -
100 W -
เบรกไฟฟ้า *
เบรกไฟฟ้ารักษาตำแหน่งหยุดเมื่อหยุด ดังนั้นจึงไม่จำเป็นต้องใช้เบรกกลไก (เบรกแม่เหล็กไฟฟ้า) เนื่องจากความยาวรวมของมอเตอร์สามารถทำให้สั้นลงได้ ทำให้สามารถออกแบบให้มีความกว้างของรถยนต์ลดลงได้
- *ใช้ได้เฉพาะเมื่อมีการจ่ายไฟเท่านั้น
ประสิทธิภาพการรับโหลดสูง: เหมาะสำหรับการรับน้ำหนักมากและการติดตั้งหุ่นยนต์และสายพานลำเลียง
แรงรับน้ำหนักแนวรัศมีที่ยอมรับได้มีผลต่อความสามารถในการรับน้ำหนักของหุ่นยนต์ขนส่ง เมื่อประกอบกับ Flange อะแดปเตอร์ไดรฟ์ จะมีความแข็งแรงสูงถึง 1500 N (153 kgf) และหัวเกียร์แบนเพลากลวงมีความแข็งแรงสูงสุดถึง 2040 N (208 kgf) ซึ่งรองรับความต้องการในการรับน้ำหนักที่มากขึ้นและการติดตั้งบนหุ่นยนต์และสายพานลำเลียง
| อัตราทดเกียร์ | 5 | 10 | 15 | 20 | 30 | 50 | 100 | 200 | |
|---|---|---|---|---|---|---|---|---|---|
| เมื่อประกอบกับ Flange อะแดปเตอร์ไดรฟ์แล้ว | 100 W*1 | 1500 | |||||||
| หัวเกียร์แบนเพลากลวง | 200 W, 400 W*2 |
1230 | 1680 | 2040 | |||||
| 100 W | 900 | 1300 | 1500 | ||||||
| 50 W, 60 W |
800 | 1200 | |||||||
| 30 W | 450 | 500 | |||||||
- *1
- ความเร็วเพลามอเตอร์ประมาณ 300 รอบ/นาที
- *2
- ความเร็วเพลามอเตอร์ 100~3000 รอบ/นาที

การตั้งตำแหน่งหยุดและการปรับละเอียด: เชื่อมโยงได้อย่างราบรื่นกับกระบวนการก่อนหน้าและถัดไป
การตั้งค่าระยะทางที่เหลือจากตำแหน่งที่กำหนด: การควบคุมตำแหน่ง
การตั้งค่าระยะการเคลื่อนที่จะคล้ายกับสเต็ปเปอร์มอเตอร์และเซอร์โวมอเตอร์ นอกเหนือจากการเคลื่อนย้ายระยะทางที่กำหนดไว้ล่วงหน้าบนไกด์แล้ว ยังสามารถทำการตั้งค่าตำแหน่งบางส่วนได้ เช่น การตั้งค่าระยะทางจากตำแหน่งอินพุตของเซ็นเซอร์ไปยังตำแหน่งหยุดเป้าหมายระหว่างการขับขี่อัตโนมัติ

การปรับตำแหน่งหยุดแบบละเอียด: การควบคุมความเร็ว
ความเร็วในการหมุนของเพลามอเตอร์สามารถตั้งค่าได้ตั้งแต่ 1 รอบ/นาที หากเปลี่ยนเป็นความเร็วในการถ่ายโอน จะเท่ากับประมาณ 0.3 เมตร/นาทีสำหรับล้อที่มีเส้นผ่านศูนย์กลาง 100 มม. ซึ่งช่วยให้สามารถทำความเร็วที่ต่ำมาก, โอเวอร์รันเล็กน้อย, และการปรับตำแหน่งหยุดได้อย่างละเอียด
ความเร็วในการหมุนสูงสุดคือ 4000 รอบ/นาที ซึ่งช่วยลดเวลาในการทำงานต่อหน่วยผลิตภัณฑ์ โดยการเพิ่มความเร็วในการถ่ายโอน

ยึดยานพาหนะให้อยู่กับที่และทำให้กระบวนการถ่ายโอนมีความเสถียร
สามารถติดตั้งเบรกแบบกลไก (เบรกแม่เหล็กไฟฟ้า) หรือเบรกไฟฟ้าเพื่อยึดยานพาหนะให้อยู่กับที่เมื่อหยุดเคลื่อนที่ เบรกจะช่วยเพิ่มความเสถียรในการทำงานโดยป้องกันไม่ให้ยานพาหนะเคลื่อนที่แม้ในขณะถ่ายโอนหรือเอียง


การเคลื่อนที่ทางตรง การหลีกเลี่ยง และการหยุด: การปรับเส้นทางของหุ่นยนต์ขนส่งอย่างยืดหยุ่น
หุ่นยนต์ขนส่งต้องการประสิทธิภาพการเดินทางที่สามารถตอบสนองต่อการเปลี่ยนแปลงที่หลากหลาย เช่น สภาพพื้นผิวและการหลีกเลี่ยงสิ่งกีดขวางที่เกิดขึ้นอย่างกะทันหัน สัญญาณฟีดแบ็กจากมอเตอร์และคำสั่งที่สอดคล้องกับแต่ละเพลาสามารถดำเนินการได้อย่างราบรื่น ช่วยให้สามารถปรับการเคลื่อนที่ตรง, การหลีกเลี่ยง, และการหยุดได้อย่างยืดหยุ่น
ติดตั้งเซ็นเซอร์ความละเอียดสูง
ความละเอียดการควบคุมสูงสุดของเซ็นเซอร์คือ 36,000 พัลส์/รอบ ซึ่งให้ข้อมูลที่ละเอียดเกี่ยวกับสภาพการขับขี่และตำแหน่งปัจจุบัน
การทำงานข้อมูลโดยตรง
การตอบสนองต่อข้อมูลจากเซ็นเซอร์ช่วยให้สามารถดำเนินการได้อย่างยืดหยุ่น เช่น การเบรกฉุกเฉินและการรีเซ็ตความเร็วระหว่างการทำงาน
โหมดแชร์ ID และโหมดบรอดคาสต์
สามารถส่งคำสั่งไปยังเพลายานพาหนะหลายคันพร้อมกันได้ ทำให้สามารถเลี้ยวฉับพลันได้อย่างแม่นยำ และป้องกันการเคลื่อนที่แบบซิกแซกเมื่อเริ่มการเคลื่อนไหว
ฟังก์ชันที่มีประโยชน์ระหว่างการตั้งค่า
มีการตั้งค่าหลายแบบที่สามารถใช้ได้ในเครือข่าย
- BLV-R ซีรีส์
-
 ,
,
- BLH ซีรีส์
-
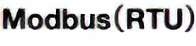
BLV-R ซีรีส์ และ BLH ซีรีส์ สามารถควบคุมได้ด้วยซอฟต์แวร์ที่สร้างขึ้นใน "ROS"
- BLV-R ซีรีส์ ไม่สามารถใช้โหมดการแชร์ ID เมื่อควบคุมโดยซอฟต์แวร์ที่สร้างขึ้นใน "ROS"
การปรับค่า(Gain)ได้ตามโหลด
การปรับค่า (Gain) การตอบสนองสามารถปรับได้ตามโหลด ซึ่งช่วยให้การขับขี่มีความเสถียร
การตรวจสอบสถานะ
ฟังก์ชันการตรวจสอบในซอฟต์แวร์สนับสนุนช่วยให้คุณสามารถตรวจสอบสถานะได้ ซีรีส์ BLV ประเภท R ยังติดตั้งระบบติดตามซึ่งสามารถวัดอย่างต่อเนื่องได้นานสูงสุด 1 วันเต็ม ซึ่งจะช่วยให้การหาสาเหตุของปัญหาที่อาจเกิดขึ้น
- *CiA® และ CANopen® เป็นเครื่องหมายการค้าจดทะเบียนของ CAN in Automation e.V.
- *Modbus (RTU) เป็นเครื่องหมายการค้าจดทะเบียนของ Schneider Automation Inc.
ผลิตภัณฑ์ที่เข้ากันได้
-
-
-
BLH ซีรีส์ ยังมีจำหน่ายในรูปแบบมอเตอร์แบบแยกต่างหาก
-

| Features Introduced | Output | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 15 W | 30 W | 50 W | 60 W | 100 W | 200 W | 400 W | |||
| Low clearance and slim design High load performance |
output shaft | Hollow Shaft Flat Gearhead | ● ● | ● ● | ● | ● ● | ● | ● | |
| Flange Drive Adapter | ● ● | ||||||||
| Compact, flat drivers | ● ● | ● ● | ● ● | ● | ● ● | ● | ● | ||
| Electromagnetic Brake | ● ● | ● ● | ● ● | ● | ● | ||||
| Electric Brake | Load Hold Function | ● | ● | ● | |||||
| S-ON | ● | ● | ● | ● | |||||
| Stop Position Setting and Fine Adjustments |
Position Control | ● | ● | ● | ● | ||||
| Speed Control | 1~4000 r/min | ● | ● | ● | ● | ||||
| 80~3000 r/min | ● | ● | ● | ||||||
| 100~3000 r/min | ● | ● | ● | ● | |||||
| Moving Straight Avoiding Stopping |
High Resolution Sensor | ● | ● | ● | ● | ||||
| Direct data operation | ● | ● | ● | ● | |||||
| Data Transmission | ID Share Mode | ● | ● | ● | ● | ||||
| Broadcast Mode | ●※ | ●※ | ●※ | ● | ● | ● | ● | ||
| Compatible Network | Modbus (RTU) | ●※ | ●※ | ●※ | ● | ● | ● | ● | |
| CANopen | ● | ● | ● | ● | |||||
| Gain Adjustment | ● | ● | ● | ● | |||||
| Support Software | ● | ● | ● | ● | ● | ● | ● | ||
- *RS-485 communication type only