การสนับสนุนอย่างกว้างขวางสำหรับการผลิตภายในและการนำหุ่นยนต์เข้ามาใช้
เมื่อมีการนำหุ่นยนต์ไปใช้งาน คุณมีข้อกังวลหรือความไม่แน่ใจเกี่ยวกับการออกแบบ เช่น "ฉันต้องการผลิตหุ่นยนต์ภายใน" "ผลิตภัณฑ์เชิงพาณิชย์มีฟังก์ชันที่ซับซ้อนเกินไป" หรือ "ฉันไม่รู้ว่าจะเลือกมอเตอร์สำหรับการผลิตภายในอย่างไร?"
ในหน้านี้โอเรียนทัลมอเตอร์ แนะนำจุดสำคัญที่อิงจากหน่วยสาธิตที่ผลิตจริงโดยโอเรียนทัลมอเตอร์
นอกจากนี้ ยังจะแนะนำบริการที่เกี่ยวข้องสำหรับลูกค้าที่กำลังพิจารณาการผลิตหุ่นยนต์ภายในองค์กร
กรุณาติดต่อเราหากคุณมีคำถามใด ๆ
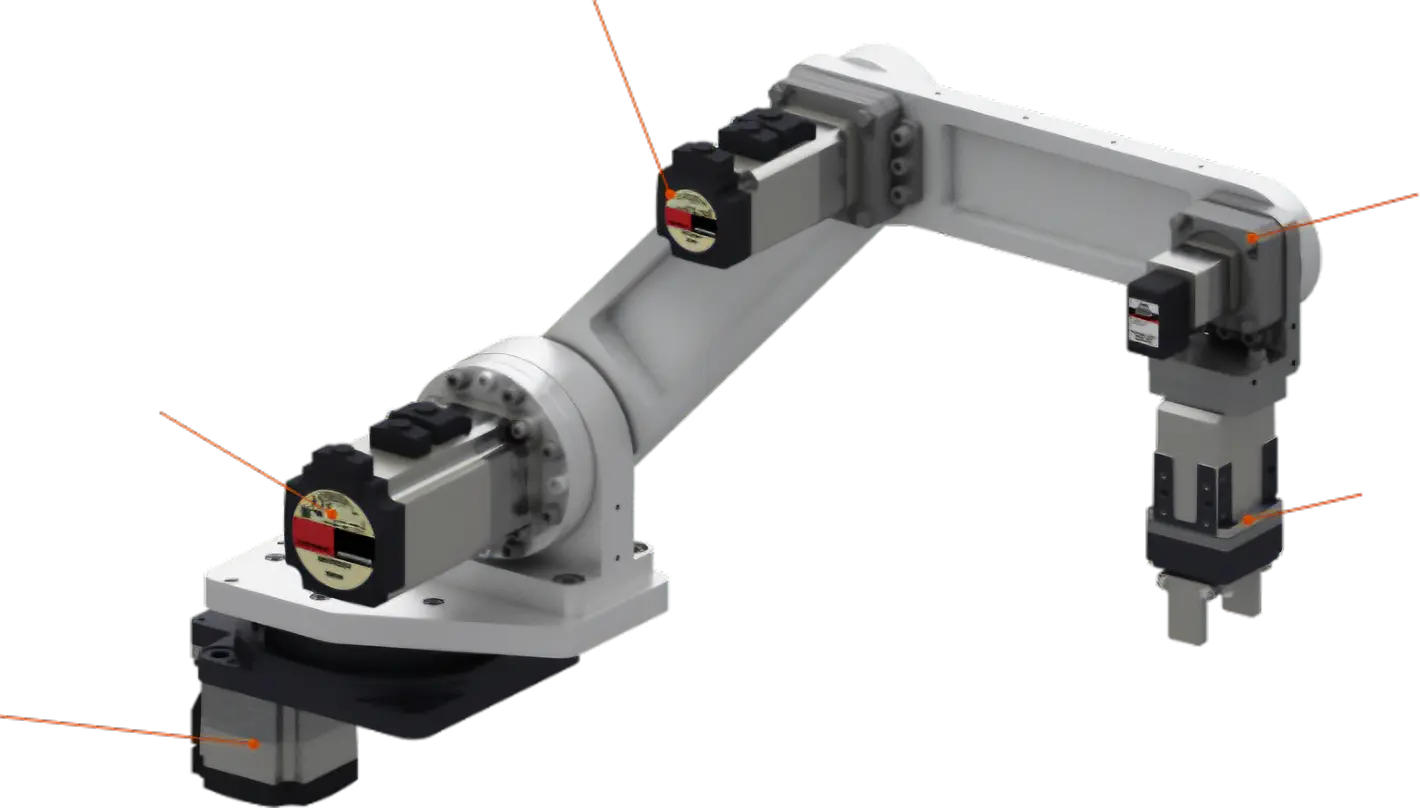
หน่วยสาธิตหุ่นยนต์แบบมีข้อต่อ
ภาพรวมของหน่วยสาธิต
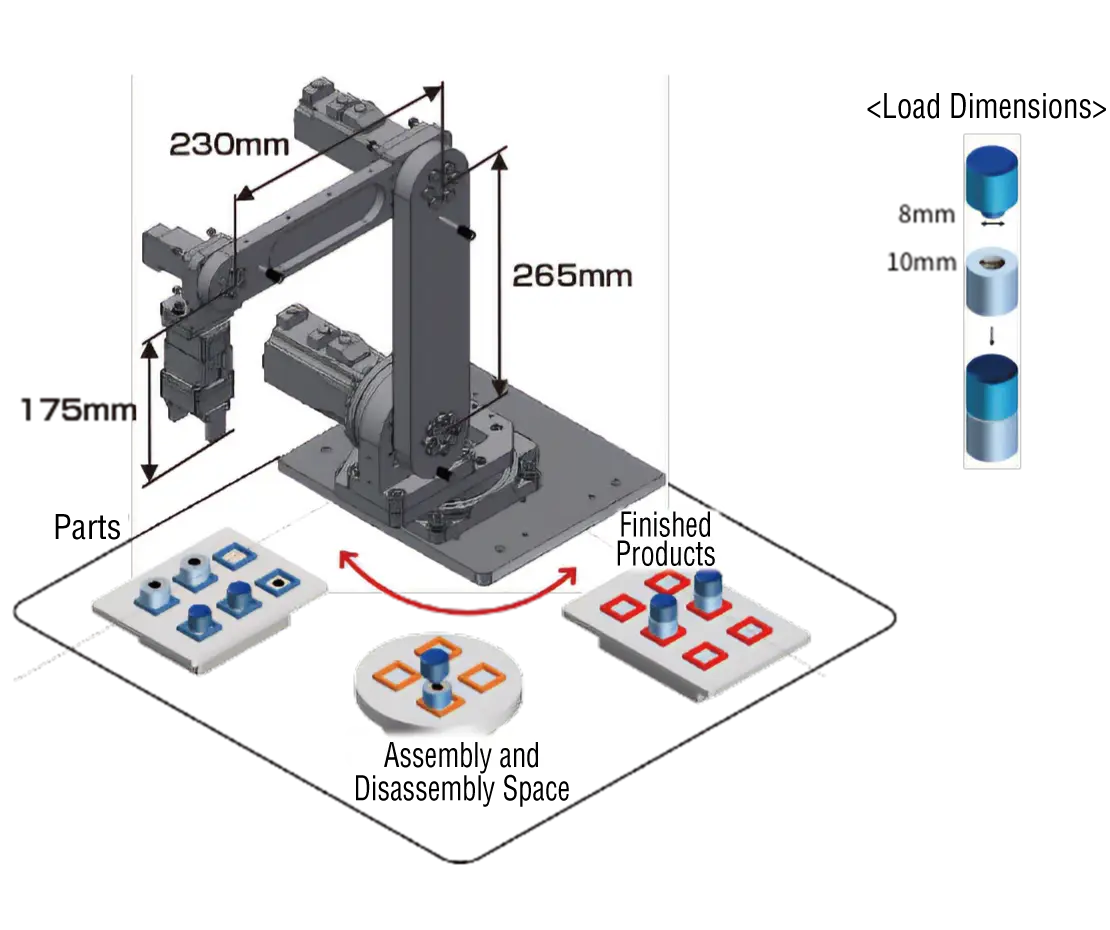
นี่คือตัวอย่างการสาธิตของหุ่นยนต์แบบข้อต่อที่เลียนแบบกระบวนการประกอบชิ้นส่วน
หยิบและวางชิ้นส่วน 2 ชิ้นในพื้นที่การประกอบ ประกอบชิ้นส่วน และถ่ายโอนผลิตภัณฑ์ที่เสร็จสมบูรณ์ไปยังพื้นที่ที่เสร็จสิ้น
| Number of axes | 5-axis |
|---|---|
| Installation Method | Floor-mounted |
| Arm Length | 653 mm |
| Load Mass | 300 g |
| Main Power Supply | 100 VAC* |
| Mass | 30 kg |
- *แหล่งจ่ายไฟสำหรับการขับเคลื่อนและควบคุมตัวขับคือ 24 VDC
การตั้งค่าระบบ
แต่ละแกนถูกควบคุมซิงโครนัสโดย MECHATROLINK-III
การกำหนดพิกัดใช้ฟังก์ชันบล็อกของ PLC
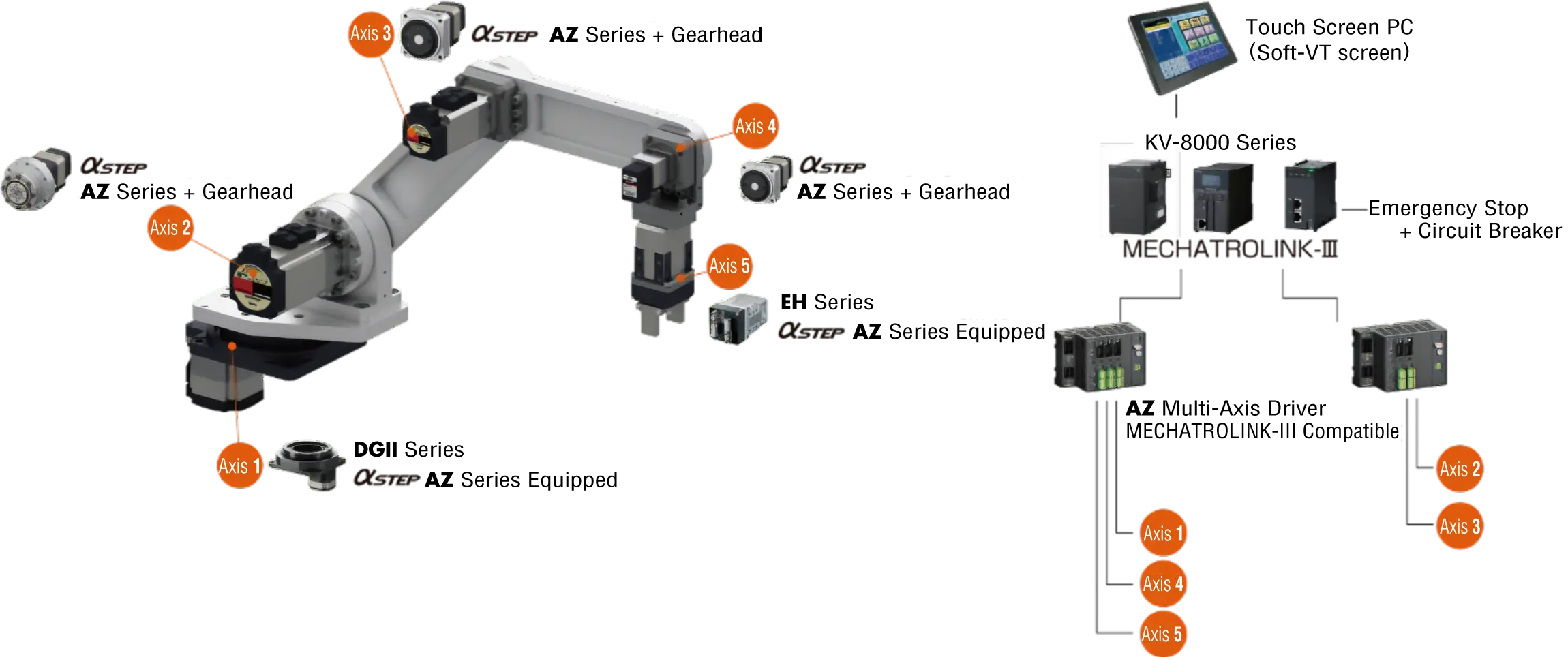
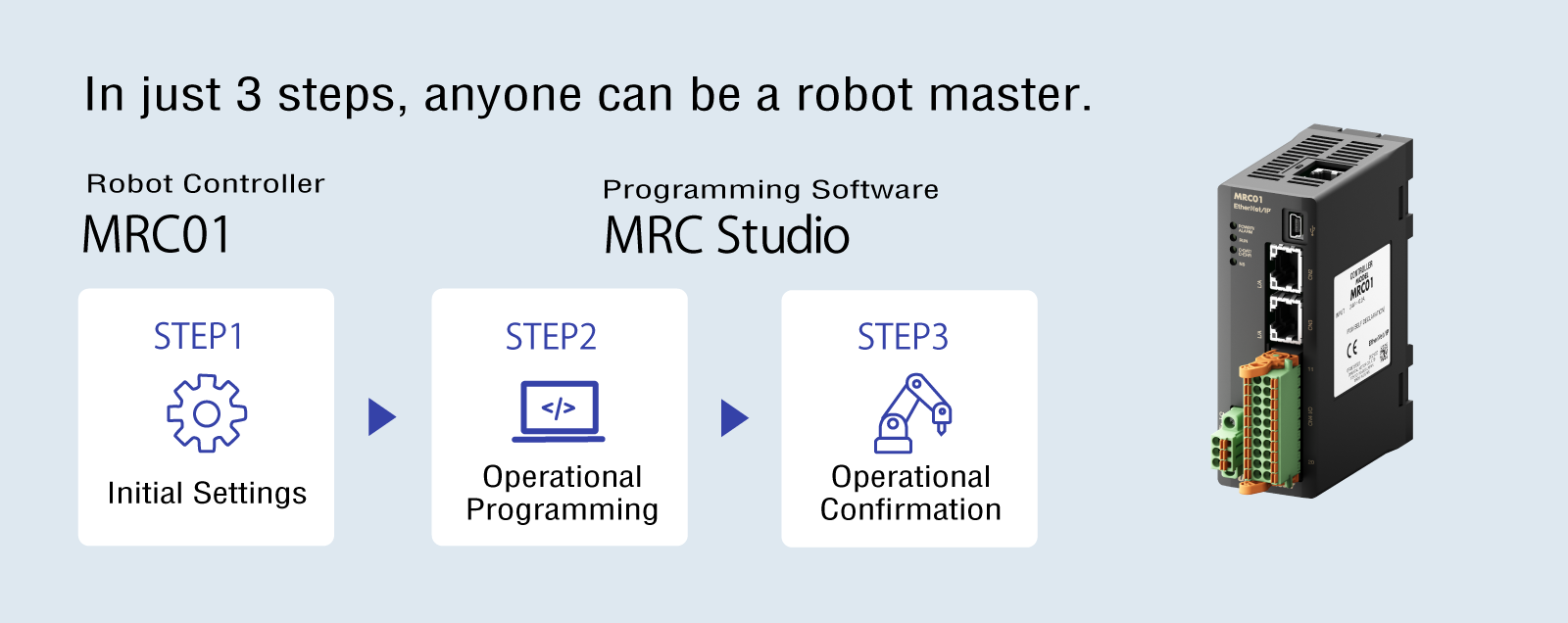
คุณสามารถสร้างหุ่นยนต์ของตัวเองได้อย่างง่ายดายด้วย AZ Series
และยังมีตัวควบคุมหุ่นยนต์ที่สามารถตั้งค่าและโปรแกรมได้อีกด้วย
- *MRC01 ไม่ได้ถูกใช้ในหน่วยสาธิตนี้
รายการส่วนประกอบ
มอเตอร์และแอคทูเอเตอร์ไฟฟ้า
| Axis | Product Name | List Price | |
|---|---|---|---|
|
Axis 1 
|
Hollow Rotary Actuator | DGM130R-AZAK | THB 65,052 |
| Flexible connection cable*1 | CC020VZRA | THB 3,087 | |
|
Axis 2 
|
Motor | AZM66MK | THB 19,488 |
| Gearhead |
CSG-20-100-2UH-LW-SP-B
|
*3 | |
| Flexible Connection Cable Set For the electromagnetic brake motor only*2 |
CC030VZRBA | THB 4,702 | |
|
Axis 3 
|
Motor | AZM46MK | THB 16,032 |
| Gearhead |
CSF-11-100-2UP-SP-C
|
*3 | |
| Flexible Connection Cable Set For the electromagnetic brake motor only*2 |
CC030VZRBA | THB 4,702 | |
|
Axis 4 
|
Motor | AZM24AK | THB 9,744 |
| Gearhead |
CCSF-8-100-2UP-SP-A
|
*3 | |
| Flexible connection cable*2 | CC030VZ2RA | THB 3,427 | |
|
Axis 5 
|
Electric Gripper | EH4-AZAKH | THB 24,550 |
| Flexible connection cable*1 | CC030VZ2RA | THB 3,427 | |
- *1
- The length is 2 m.
- *2
- The length is 3 m.
- *3
- Please contact Oriental Motor for details.
Driver 
| Axis | Product Name | List Price | ||
|---|---|---|---|---|
|
Axis 1 Axis 4 Axis5 |

|
Multi-Axis Driver Number of Axes: 3 | AZD3A-KM3 | THB 41,298 |
| Main Power Supply Cables | LC03D06A | THB 567 | ||
| Control Power Supply Cables | LC02D06A | THB 510 | ||
|
Axis2 Axis3 |

|
Multi-axis driver number of axes: 2 | AZD2A-KM3 | THB 31,158 |
| Main Power Supply Cables | LC03D06A | THB 567 | ||
| Control Power Supply Cables | LC02D06A | THB 510 | ||
- ※
 is a registered trademark of Harmonic Drive Systems Inc.
is a registered trademark of Harmonic Drive Systems Inc. - ※
 MECHATROLINK is a registered trademark of MECHATROLINK Members Association.
MECHATROLINK is a registered trademark of MECHATROLINK Members Association.
แกนที่ ① - แกนหมุนแขน
<ความสามารถในการรับน้ำหนักสูงและความแข็งแกร่ง> แอคชูเอเตอร์แบบหมุน DGII ซีรีส์
เพื่อรองรับแรงบิดที่เพิ่มขึ้นจากท่าทางของแขนที่หลากหลาย
ใช้โต๊ะที่มีความแข็งแกร่งสูงและทนทานต่อแรงบิดสูง
หุ่นยนต์ที่มีข้อต่อสร้างแรงบิดขนาดใหญ่เมื่อจับชิ้นงานที่อยู่ห่างจากแกน ①.
DGII ซีรีส์ ใช้ตลับลูกปืนลูกกลิ้งข้ามสำหรับโต๊ะเอาท์พุตแบบกลวงเพื่อให้สามารถรับแรงบิดได้สูง
สิ่งนี้ช่วยให้แขนสามารถยืดออกได้ยาวขึ้น ซึ่งส่งผลให้มีขอบเขตการเคลื่อนไหวที่เพิ่มมากขึ้นสำหรับหุ่นยนต์
คลิกที่นี่เพื่อดูตัวอย่างเฉพาะของความแข็งแกร่งสูง
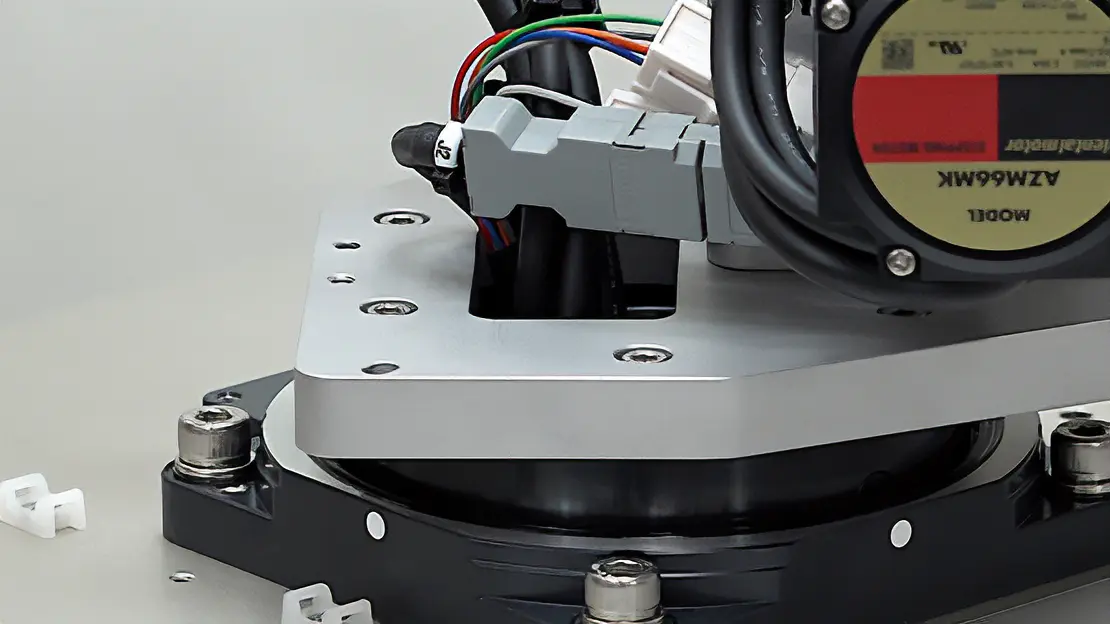
ทำให้การเดินสายเคเบิลไฟฟ้าง่ายขึ้น
สายไฟภายในหุ่นยนต์ถูกรวมเข้ากับฐานของแขน รูหลุมขนาดใหญ่ (through-hole) ช่วยให้การเดินสายไฟและท่อทำได้อย่างซับซ้อน ซึ่งช่วยให้ออกแบบอุปกรณ์ได้ง่ายขึ้น
มอเอตร์ที่ติดตั้งอยู่ในหุ่นยนต์

แอคชูเอเตอร์แบบหมุน
DGII ซีรีส์
นี่คือผลิตภัณฑ์ที่รวมกันระหว่างแอคชูเอเตอร์แบบหมุนกลวงและ αSTEP. การขับเคลื่อนด้วยกำลังสูงเป็นไปได้เนื่องจากกลไกการลดความเร็วภายในตัวกระตุ้น
แกนที่ ② - แกนข้อต่อ
[น้ำหนักเบา, ความแข็งแกร่งสูง, ไม่มีแบ็กลาช]
หัวเกียร์ CSG ซีรีส์ ประเภทแพ็คเกจ โมเดลน้ำหนักเบา
ลดความคลาดเคลื่อนที่ปลายแขนเพื่อการเคลื่อนไหวที่แม่นยำสูง
แม้การเบี่ยงเบนเล็กน้อยที่ข้อต่อใกล้กับแกน ① อาจกลายเป็นเรื่องใหญ่ที่ปลายแขน ทำให้ไม่สามารถจับภาระได้อย่างแม่นยำ
CSG ซีรีส์ ใช้หัวเกียร์แบบไม่มีการย้อนกลับเพื่อลดการเบี่ยงเบนและรับประกันการทำงานที่แม่นยำ
![[Image of Backlash and Robot Tip Misalignment]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_21_en.webp)
แกนข้อต่อที่มีน้ำหนักเบาเพื่อเพิ่มความยืดหยุ่นในการออกแบบ
โดยการลดน้ำหนักของแต่ละแกนข้อต่อ จะช่วยลดโมเมนตัมเฉื่อยและควบคุมข้อกำหนด (แรงบิดและความแข็งแกร่ง) ของส่วนประกอบทางกล
CSG ซีรีส์ มีน้ำหนักเบาและในเวลาเดียวกันมีความแข็งแกร่งสูง ทำให้สามารถติดตั้งโหลดได้โดยตรง
โดยไม่ต้องใช้ชิ้นส่วนยึด ทำให้แขนเบาขึ้นและช่วยเพิ่มความยืดหยุ่นในการออกแบบ

มอเอตร์ที่ติดตั้งอยู่ในหุ่นยนต์

รุ่นแพ็คเกจประเภท CSG ซีรีส์ แบบน้ำหนักเบา
สำหรับรายละเอียดเพิ่มเติม กรุณาติดต่อสำนักงานขายของ โอเรียนทัล มอเตอร์ ที่ใกล้ที่สุด .
แกนที่ ③, แกนที่ ④ - แกนข้อต่อ
[แบนพิเศษ, ความแข็งแกร่งสูง, ไม่มีแบ็คแลช]
หัวเกียร์ CSF mini ซีรีส์ ประเภท 2UP
ลดความคลาดเคลื่อนที่ปลายแขนเพื่อการเคลื่อนไหวที่แม่นยำสูง
แม้การเยื้องเพียงเล็กน้อยที่ข้อต่อใกล้แกนที่ ① ก็อาจกลายเป็นความคลาดเคลื่อนที่มากที่ปลายแขน ทำให้ไม่สามารถจับโหลดได้อย่างแม่นยำbr>CSF mini ซีรีส์ ใช้หัวเกียร์แบบไม่มีแบ็คแลช (non-backlash) เพื่อลดความคลาดเคลื่อนและรับประกันการทำงานที่แม่นยำ
![[Image of Backlash and Robot Tip Misalignment]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_32_en.webp)
แกนข้อต่อที่มีน้ำหนักเบาเพื่อเพิ่มความยืดหยุ่นในการออกแบบ
การลดน้ำหนักของแต่ละแกนข้อต่อช่วยลดโมเมนตัมเฉื่อยและควบคุมข้อกำหนด (แรงบิดและความแข็งแกร่ง) ของส่วนประกอบทางกล
CSF mini ซีรีส์ มีน้ำหนักเบาและในเวลาเดียวกันมีความแข็งแกร่งสูง ทำให้สามารถติดตั้งโหลดได้โดยตรง
โดยไม่ต้องใช้ชิ้นส่วนยึด ซึ่งทำให้แขนเบาขึ้นและช่วยเพิ่มความยืดหยุ่นในการออกแบบ
-
![[Axis ③]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_34.webp)
[Axis ③] -
![[Axis ④]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_35.webp)
[Axis ④]
มอเอตร์ที่ติดตั้งอยู่ในหุ่นยนต์

CSF mini ซีรีส์ ประเภท 2UP
สำหรับรายละเอียดเพิ่มเติม กรุณาติดต่อสำนักงานขายของ โอเรียนทัล มอเตอร์ ที่ใกล้ที่สุด.
แกนที่ ⑤ - แกนปลายมือ (end effector)
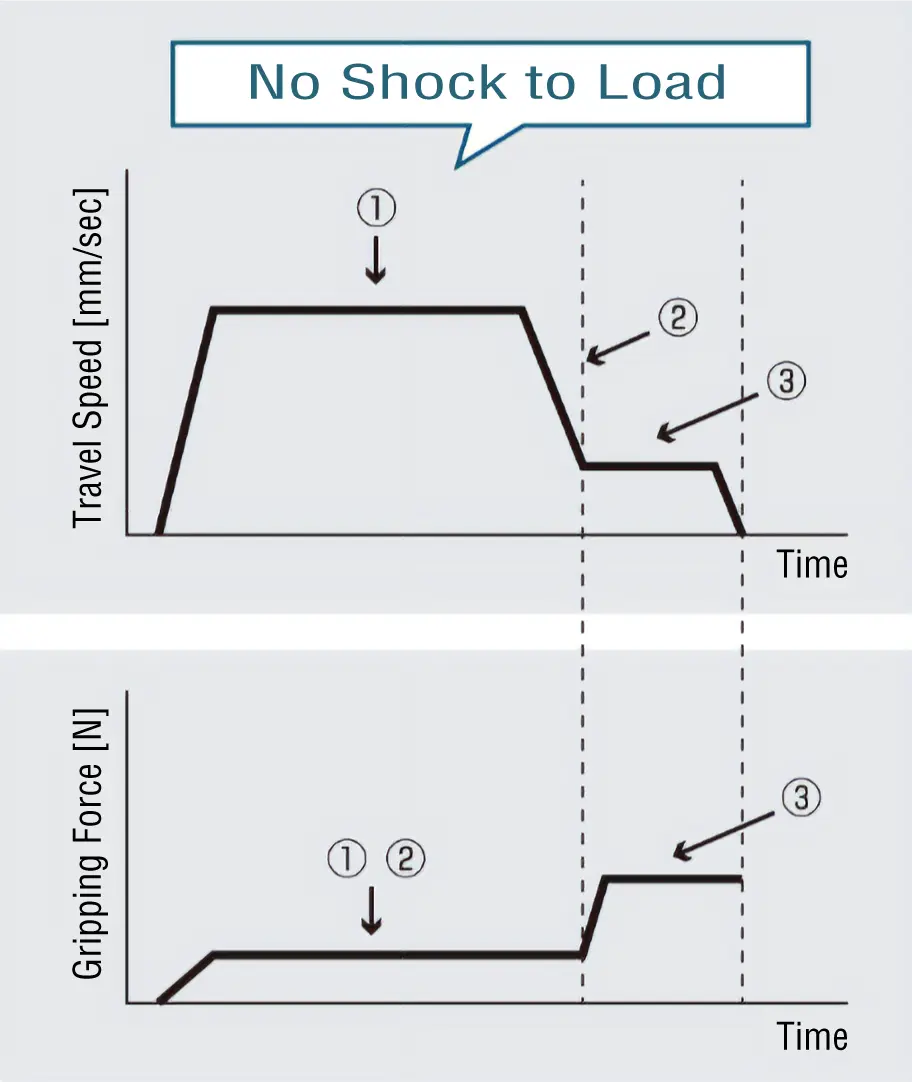
<ขนาดกะทัดรัดและน้ำหนักเบา> กริปเปอร์ไฟฟ้า EH ซีรีส์
สามารถหยิบจับสิ่งของได้หลายประเภทด้วยอุปกรณ์เพียงชิ้นเดียว
EH ซีรีส์ สามารถใช้กับโหลดที่หลากหลายได้เพราะสามารถตั้งค่าแรงในการจับได้อย่างอิสระ
(Stroke 25 mm)
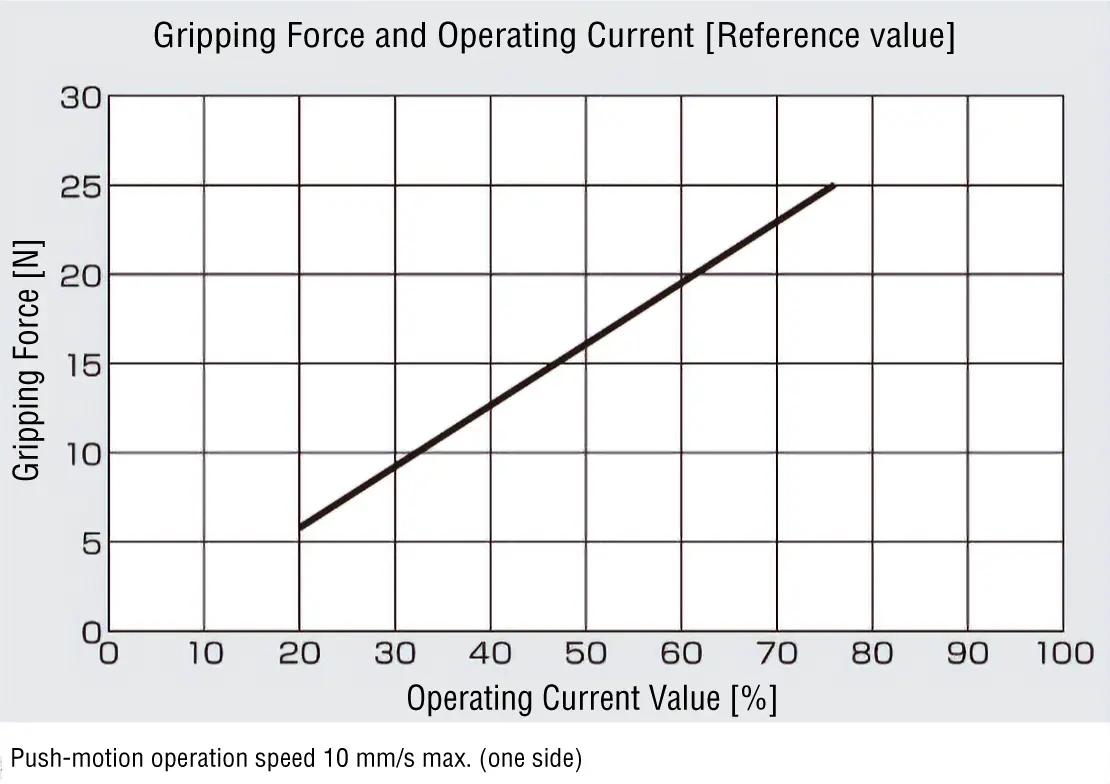
แรงในการจับสูงสุด 25 N
[ช่วงแรงในการจับ (ค่าที่อ้างอิง) ประมาณ 6 N~25 N]
![[ Example of gripping image ]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_24_en.webp)
1 หน่วยสำหรับงานจับยึดที่หลากหลาย
เนื่องจากมันอนุญาตให้มีการตั้งค่าตําแหน่งของกางเกงยึดเวลาจับและแรงจับได้โดยอิสระ มันสามารถให้การจับได้หลากหลาย
คลิกที่นี่เพื่อดูวิดีโอเกี่ยวกับกริปเปอร์
คลิกที่นี่เพื่อดูตัวอย่างกริปเปอร์
![[ Gripping example: Quickly until just before → Gripping slowly ]](/sites/default/files/image/solutions/casestudies/applications/robotsupport/robotsupport_25_en.webp)
มอเอตร์ที่ติดตั้งอยู่ในหุ่นยนต์

Electric Gripper EH Series αSTEP AZ Series Equipped
กริปเปอร์ไฟฟ้านี้รวมกลไกแร็คและพินเนียนเข้ากับซีรีส์ αSTEP AZ มันสามารถ "จับ" ได้อย่างละเอียดอ่อนเหมือนปลายนิ้วของมนุษย์ และช่วยในการทำงานอัตโนมัติและประหยัดแรงงาน
ใช้ได้กับทุกแกน
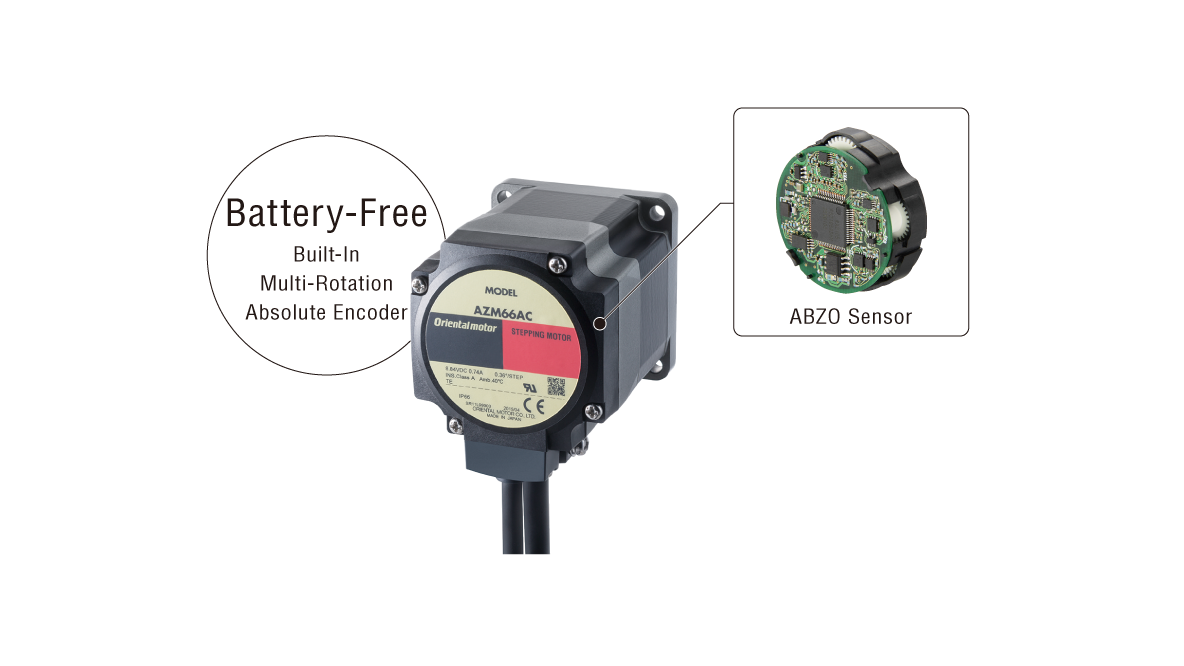
αSTEP AZ ซีรีส์
เอ็นโค้ดเดอร์แบบสัมบูรณ์อัตโนมัติเพื่อเก็บข้อมูลตำแหน่ง
AZ ซีรีส์ มาพร้อมกับเซ็นเซอร์เอ็นโค้ดเดอร์แบบสัมบูรณ์ที่ไม่มีแบตเตอรี่ในตัว <เซ็นเซอร์ ABZO>. ข้อมูลตำแหน่งจะถูกเก็บรักษาไว้แม้ว่าจะมีการตัดไฟจากการหยุดฉุกเฉินหรือไฟดับระหว่างการทำงานในการตั้งตำแหน่งก็ตาม
คลิกที่นี่เพื่อดูข้อมูลเกี่ยวกับการเริ่มต้นใหม่หลังจากการหยุดจ่ายไฟ
รายงานทางเทคนิค RENGA
เนื้อหาทางเทคนิคที่นำเสนอข้อมูลทางเทคนิคที่มีประโยชน์และความพยายามในการพัฒนาผลิตภัณฑ์ของ โอเรียนทัล มอเตอร์ ส่วนนี้อธิบายโครงสร้างและหลักการเบื้องหลังเซ็นเซอร์ ABZO
มีสินค้ามากมายให้เลือกสรร
มีผลิตภัณฑ์หลากหลายประเภทให้เลือกสรร ซึ่งมีขนาดหน้าแปลนที่แตกต่างกัน ลักษณะแรงบิดที่หลากหลาย และผลิตภัณฑ์ที่มีเบรกแม่เหล็กไฟฟ้า
สามารถเลือกมอเตอร์ที่เหมาะสมที่สุดสำหรับแต่ละแกนได้
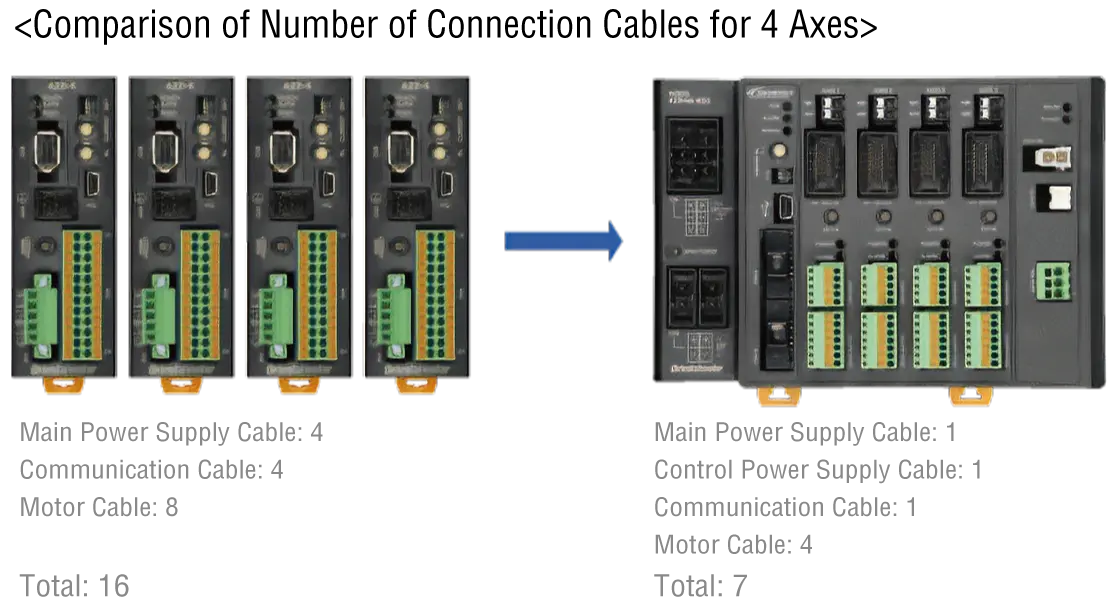
ไดรเวอร์หลายแกน (Multi-Axis Driver)
รวมไดรเวอร์เพื่อลดปริมาณการเดินสาย
ไดรเวอร์หลายแกนสามารถเชื่อมต่อมอเตอร์ได้ตั้งแต่ 2 ถึง 4 แกน
เนื่องจากไดรเวอร์สามารถรวมอยู่ในหน่วยเดียว จึงทำให้สามารถลดปริมาณการเดินสาย เช่น สายเชื่อมต่อกับอุปกรณ์หลักและสายจ่ายไฟ
การสนับสนุนสำหรับเครือข่ายการเคลื่อนไหวที่หลากหลาย
มีผลิตภัณฑ์ที่รองรับโปรไฟล์ไดรเวอร์ MECHATROLINK-III, EtherCAT, และ SSCNET III/H
มอเอตร์ที่ติดตั้งอยู่ในหุ่นยนต์

เอ็นโค้ดเดอร์แบบสัมบูรณ์ที่ไม่มีแบตเตอรี่ในตัว αSTEP AZ ซีรีส์
αSTEP ซึ่งใช้การควบคุมแบบปิดที่เป็นเอกลักษณ์ของ โอเรียนทัล มอเตอร์ มาพร้อมกับเซ็นเซอร์ ABZO ที่พัฒนาขึ้นใหม่ การระบุตำแหน่งในโหมดสัมบูรณ์ตอนนี้เป็นไปได้โดยไม่ต้องใช้แบตเตอรี่แล้ว การวางตำแหน่งขั้นสูงเป็นไปได้ในราคาที่เข้าถึงได้

αSTEP AZ ซีรีส์ ไดรเวอร์หลายแกน (DC Input)
นี่คือไดรเวอร์หลายแกนที่สามารถเชื่อมต่อกับมอเตอร์ไฟฟ้ากระแสตรง AZ ซีรีส์ ของโอเรียนทัล มอเตอร์ และแอคทูเอเตอร์ไฟฟ้าที่ติดตั้งมอเตอร์ดังกล่าวได้ ผลิตภัณฑ์ที่รองรับโปรไฟล์ขับเคลื่อน SSCNET III/H, MECHATROLINK-III และ EtherCAT มีให้บริการแล้ว
การสนับสนุนการผลิตหุ่นยนต์ภายในตั้งแต่ขั้นตอนการเลือกผลิตภัณฑ์
การสนับสนุนสำหรับการเลือกมอเตอร์
พนักงานจะเลือกมอเตอร์ให้คุณ
ดาวน์โหลดเอกสารข้อมูลแนะนำผลิตภัณฑ์ กรอกข้อมูลที่จำเป็น และทำการขอผ่านแบบฟอร์มอีเมล* หรือส่งทาง แฟกซ์ไปยังศูนย์สนับสนุนลูกค้าใกล้คุณ.
เราสามารถทำงานจากเอกสารอ้างอิงของคุณ เช่น แผนผังกลไก, รูปภาพแนวคิด, และข้อมูล CAD
- * จำเป็นต้องลงทะเบียนและเข้าสู่ระบบผู้ใช้
-
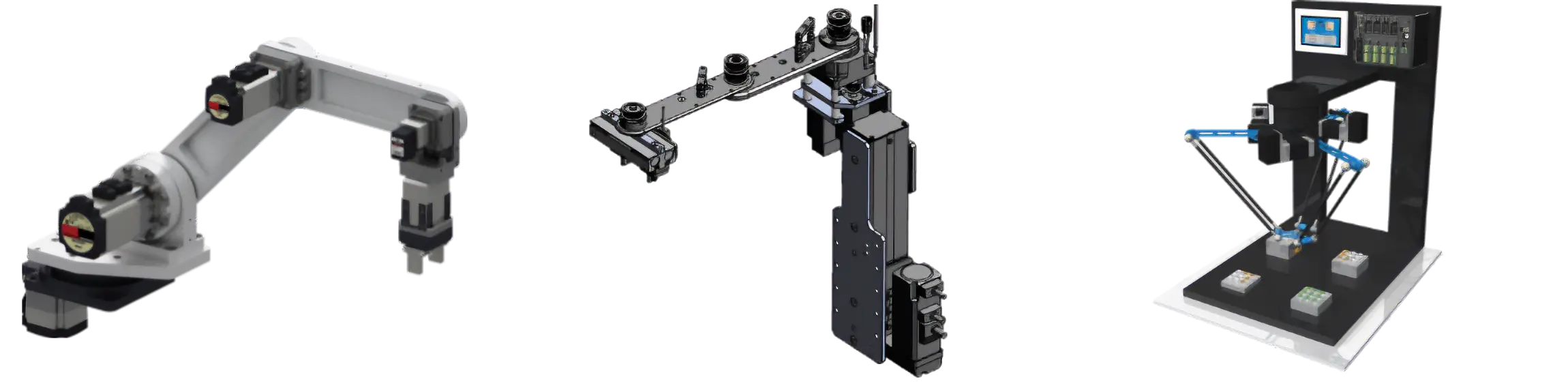
< Articulated Robot>
คลิกที่นี่เพื่อดูรายละเอียดเกี่ยวกับบริการ -
<SCARA Robot>
คลิกที่นี่เพื่อดูรายละเอียดเกี่ยวกับบริการ <Parallel Link Robot>
คลิกที่นี่เพื่อดูรายละเอียดเกี่ยวกับบริการ
-
เอกสารเกี่ยวกับหน่วยสาธิตมีให้บริการแล้ว
ข้อมูลเกี่ยวกับหน่วยสาธิตหุ่นยนต์แขนกลที่เราแสดงมีให้บริการ สำหรับข้อมูลเกี่ยวกับฮาร์ดแวร์ เช่น ขนาดและการเดินทางของแต่ละแกน
กรุณาติดต่อ สำนักงานขายใกล้เคียง เพื่อขอข้อมูลเพิ่มเติม
-
เอกสารสำหรับการเชื่อมต่อกับ PLC มีให้บริการ
เอกสารสำหรับการเชื่อมต่อกับโมดูลเครือข่ายของ PLC จากผู้ผลิตชั้นนำมีให้บริการ ซึ่งสามารถช่วยประหยัดเวลาในการออกแบบโปรแกรมและเริ่มต้นการทำงาน ดังนั้นเราขอแนะนำให้ใช้ประโยชน์จากสิ่งนี้
คลิกที่นี่เพื่อดาวน์โหลด
เมื่อมีปัญหา เราจะแก้ไขให้โดยวิศวกรผู้เชี่ยวชาญ
วิศวกรของเราจะไปบริการที่สถานที่ทำงานของคุณเพื่อตอบสนองต่อปัญหาเกี่ยวกับมอเตอร์ที่อาจเกิดขึ้นหลังจากที่หุ่นยนต์เริ่มใช้งาน