SCARA Robot (หุ่นยนต์ข้อต่อแนวนอน) ตัวอย่างการผลิตภายในองค์กรในงานอัตโนมัติสำหรับการหยิบและวาง รวมถึงการขนส่งระหว่างกระบวนการ
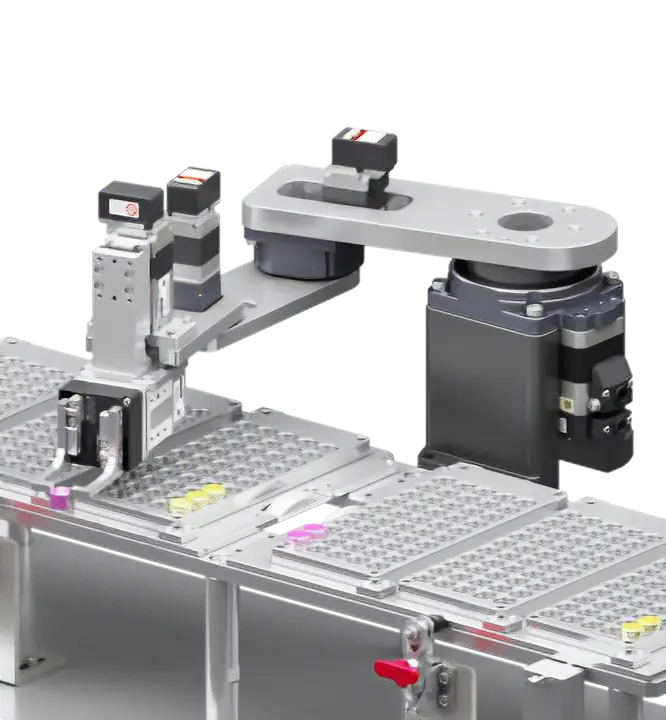
ตัวอย่างจริงของอุปกรณ์หุ่นยนต์ SCARA
ภาพรวมของอุปกรณ์
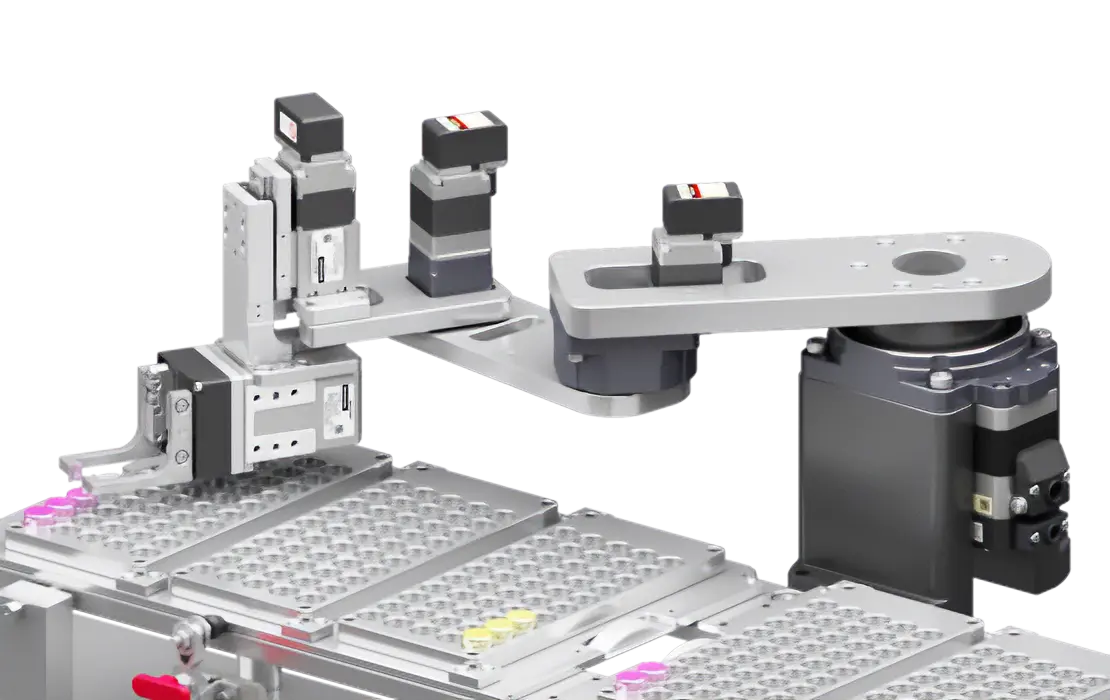
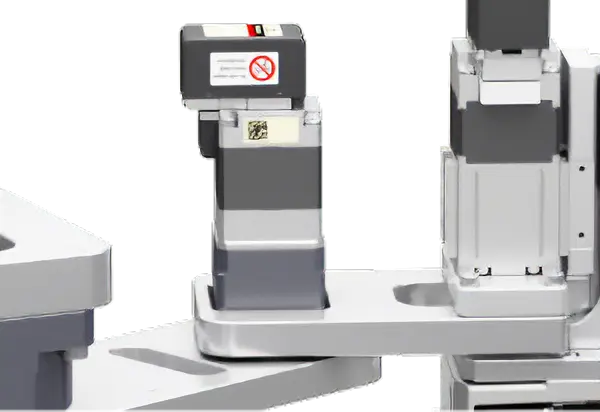
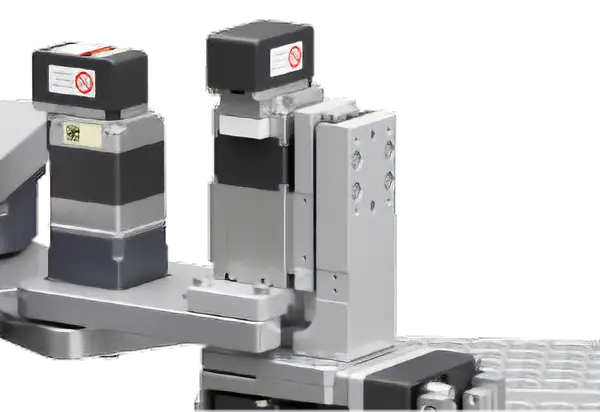
นี่คือหุ่นยนต์ SCARA ที่สร้างขึ้นภายในองค์กร (ผลิตเอง) ซึ่งทำหน้าที่อัตโนมัติในการหยิบและวาง รวมถึงการขนส่งระหว่างกระบวนการ
ผลิตภัณฑ์นี้ถูกใช้ในสายการผลิตที่ทำงานอัตโนมัติในกระบวนการทากาว, วัดค่า, และประกอบชิ้นส่วน ซึ่งเดิมทีถูกดำเนินการโดยมนุษย์
เนื่องจากการหยิบและวาง รวมถึงการขนส่งระหว่างกระบวนการต้องทำในพื้นที่จำกัด จึงได้มีการสร้างหุ่นยนต์ SCARA ขึ้นภายในองค์กรเอง
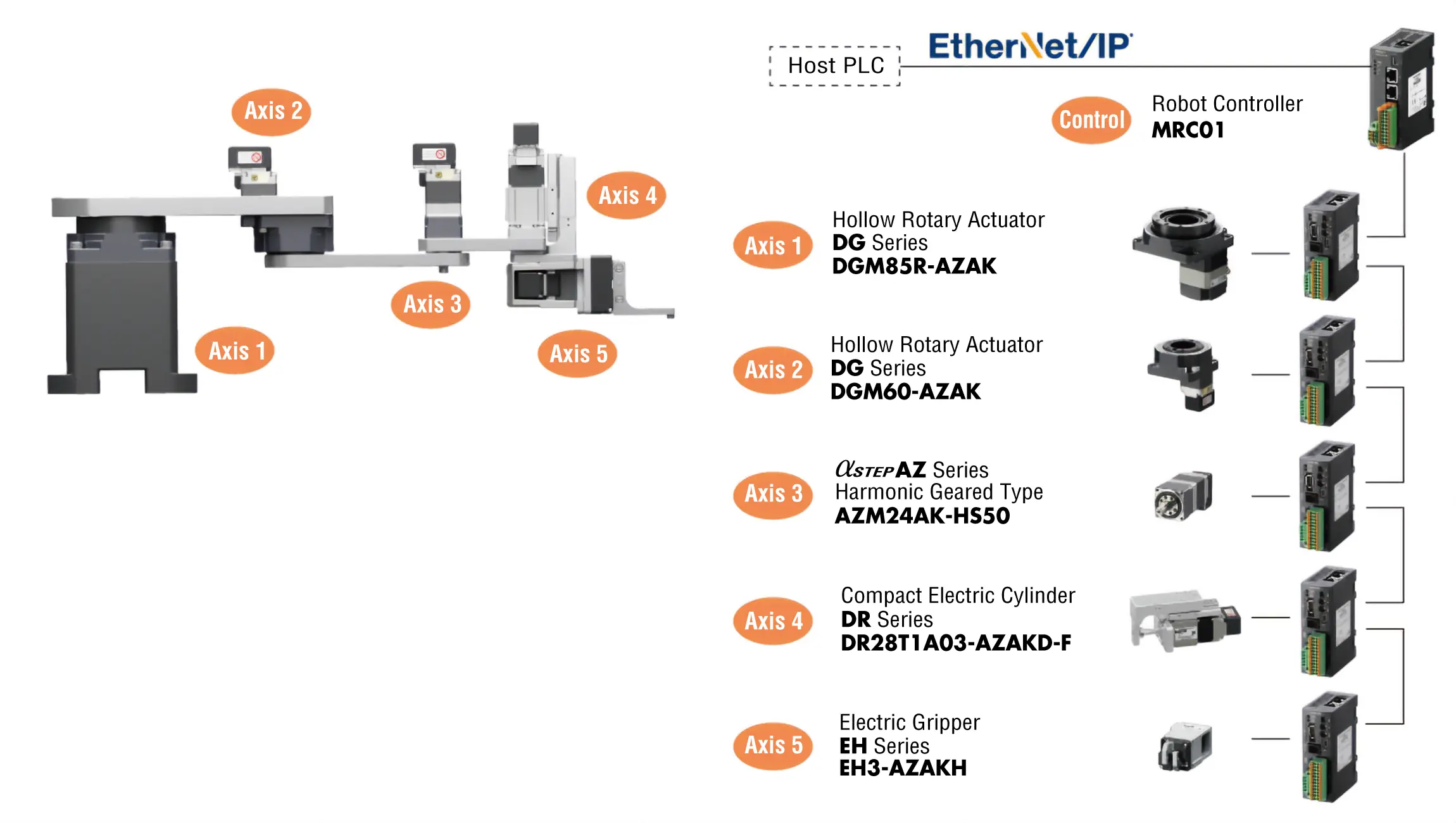
| Number of Axes | 5 axes (3 links + elevation/lowering + electric gripper) | |
|---|---|---|
| Robot Control | Robot Controller MRC01 | |
| Transportable Mass | 0.7 kg | |
| Maximum Speed | 500 mm/s
(Maximum speed at gripper tip) |
|
| Maximum Speed of Each Axis | Axis 1 | 500 mm/s |
| Axis 2 | 500 mm/s | |
| Axis 3 | 500 mm/s | |
| Axis 4 | 40 mm/s | |
| Axis 5 | 156 mm/s (both sides) | |
| Equipment Main Power Supply | 100 VAC | |
| Power Supply for Driving/Controlling | 24 VDC | |
| Mass (SCARA robot part) | 4 kg | |
การกำหนดค่าระบบ
ระบบนี้ถูกควบคุมผ่าน Ethernet/IP โดยไดรเวอร์ MRC01 และ AZ ซีรีส์ ถูกควบคุมด้วยการสื่อสาร RS-485
รายการส่วนประกอบ
| Product Name | List Price | (Online Shop Price) | ||
|---|---|---|---|---|
| Axis 1 | Hollow Rotary Actuator | DGM85R-AZAK | THB 63,403 | (THB 57,063) |
|
|
Driver (Built-in controller type) |
AZD-KD | THB 16,712 | (THB 15,041) |
| Flexible Connection Cable | CC030VZR2 | THB 3,966 | (THB 3,569) | |
| DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) | |
| RS-485 Communication Cables | CC001-RS4 | THB 878 | (THB 790) | |
| Axis 2 | Hollow Rotary Actuator | DGM60-AZAK | THB 35,392 | (THB 31,853) |
|
|
Driver (Built-in controller type) |
AZD-KD | THB 16,712 | (THB 15,041) |
| Flexible Connection Cable | CC030VZ2R2 | THB 3,966 | (THB 3,569) | |
| DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) | |
| RS-485 Communication Cables | CC001-RS4 | THB 878 | (THB 790) | |
| Axis 3 | αSTEP Harmonic Geared Type | AZM24AK-HS50 | THB 32,687 | (THB 29,418) |
|
|
Driver (Built-in controller type) |
AZD-KD | THB 16,712 | (THB 15,041) |
| Flexible Connection Cable | CC030VZ2R2 | THB 3,966 | (THB 3,569) | |
| DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) | |
| RS-485 Communication Cables | CC001-RS4 | THB 878 | (THB 790) | |
| Axis 4 | Compact Electric Cylinders | DR28T1A03-AZAKD-F | THB 43,828 | (THB 39,445) |
|
|
Driver (Built-in controller type) |
AZD-KD | THB 16,712 | (THB 15,041) |
| Flexible Connection Cable | CC030VZ2R2 | THB 3,966 | (THB 3,569) | |
| DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) | |
| RS-485 Communication Cables | CC001-RS4 | THB 878 | (THB 790) | |
| Axis 5 | Electric Grippers | EH3-AZAKH | THB 28,297 | (THB 25,467) |
|
|
Driver (Built-in controller type) |
AZD-KD | THB 16,712 | (THB 15,041) |
| Flexible Connection Cable | CC030VZ2R2 | THB 3,966 | (THB 3,569) | |
| DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) | |
| Control | Robot Controller | MRC01 | THB 77,894 | (THB 70,105) |

|
DC Power Supply Cable | CC02D010-3 | THB 538 | (THB 484) |
| RS-485 Communication Cables | CC001-RS4 | THB 878 | (THB 790) | |
| THB 392,509 | (THB 353,255) | |||






- EtherNet/IP™ is a trademark of ODVA.
- All motor cables are 3 m in length.
- All DC power supply cables are 1 m in length.
- All RS-485 communication cables are 0.1 m in length.
ส่วนควบคุม (ตัวควบคุมหุ่นยนต์)
Control Section
MRC01

ตัวควบคุมหุ่นยนต์ MRC01
การแนะนำหุ่นยนต์ภายในเข้าสู่ระบบที่มีอยู่ได้อย่างง่ายดาย
MRC01 เชื่อมต่อกับตัวควบคุมหลักผ่าน EtherNet/IP™ เพื่อการควบคุมโดยตรง คุณสามารถแนะนำหุ่นยนต์ในบ้านได้อย่างง่ายดายโดยไม่ต้องทำการเปลี่ยนแปลงระบบควบคุมของอุปกรณ์ที่มีอยู่มากนัก
- EtherNet/IP™ เป็นเครื่องหมายการค้าของ ODVA.
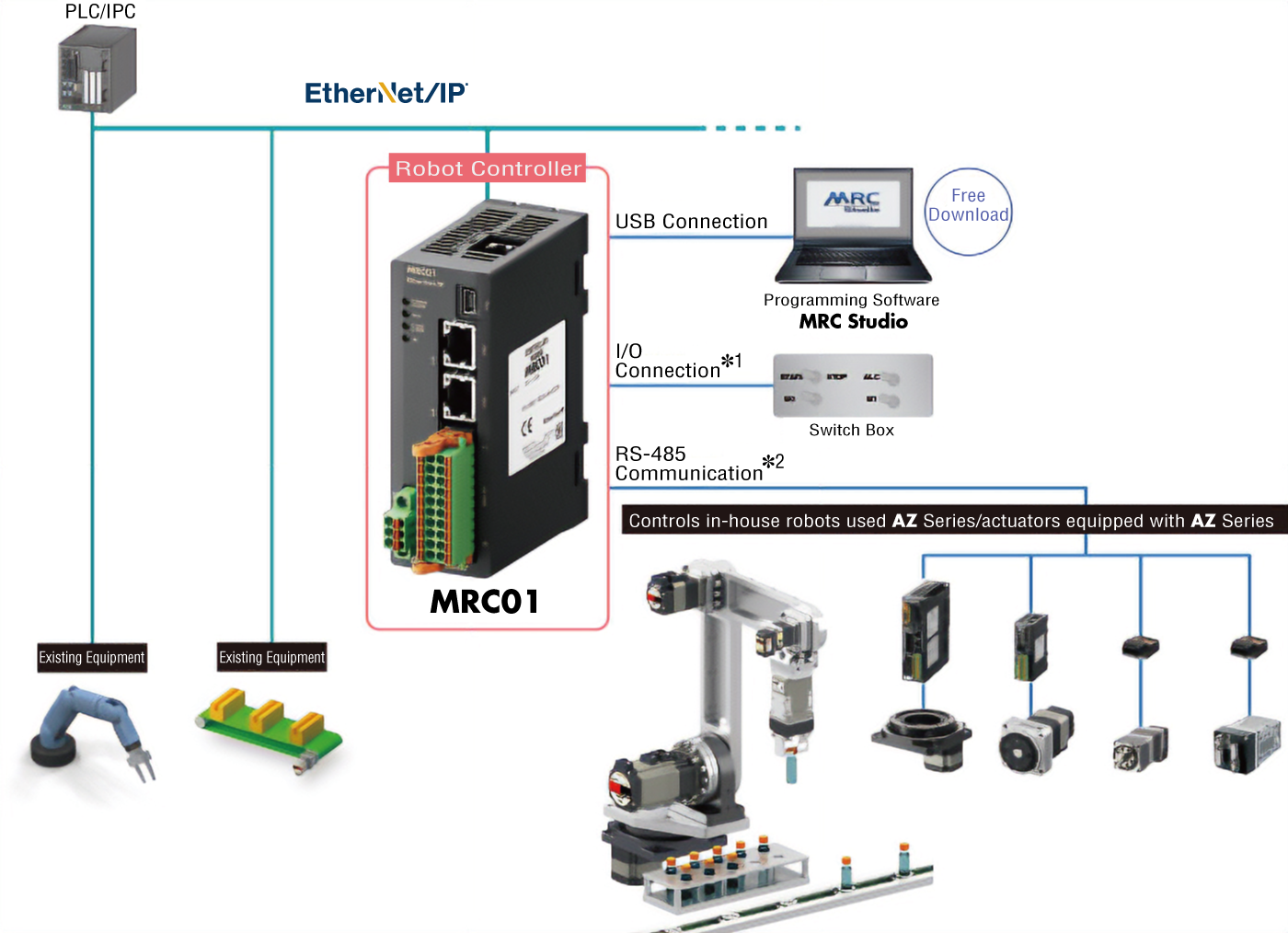
- *1
- MRC01 สามารถทำงานได้ด้วยการเชื่อมต่อ I/O (โดยไม่ต้องใช้ตัวควบคุมหลัก)
- *2
- MRC01 และไดรเวอร์ AZ Series ถูกควบคุมด้วยการสื่อสาร RS-485
การตั้งค่าได้ง่ายสำหรับผู้เริ่มต้น
MRC01 สามารถตั้งค่าได้ง่าย ตั้งแต่การตั้งค่าเริ่มต้นไปจนถึงโปรแกรมการทำงาน โดยไม่ต้องมีความรู้ทางเทคนิค เช่น ภาษาโปรแกรม การตั้งค่าเริ่มต้น เช่น การเลือกประเภทหุ่นยนต์และการป้อนข้อมูลกลไกทำได้ง่ายด้วยรูปแบบของวิซาร์ด นอกจากนี้ โปรแกรมการทำงานยังสามารถเพิ่มคำสั่งที่ต้องการขณะเคลื่อนที่หุ่นยนต์ในบ้านได้ผ่านการสอนการทำงาน
เมื่อทีมออกแบบอุปกรณ์รุ่นเยาว์ที่โอเรียนทัลมอเตอร์ ใช้ระบบนี้เป็นครั้งแรก พวกเขาสามารถสร้างโปรแกรมด้วยการสอนในเวลาเพียงประมาณ 2 ชั่วโมง เนื่องจากการตั้งค่าสำหรับหลายแกนสามารถทำได้ด้วยคำสั่งเดียว
- ซอฟต์แวร์โปรแกรม MRC Studio และไฟล์ EDS สามารถดาวน์โหลดได้ที่นี่.
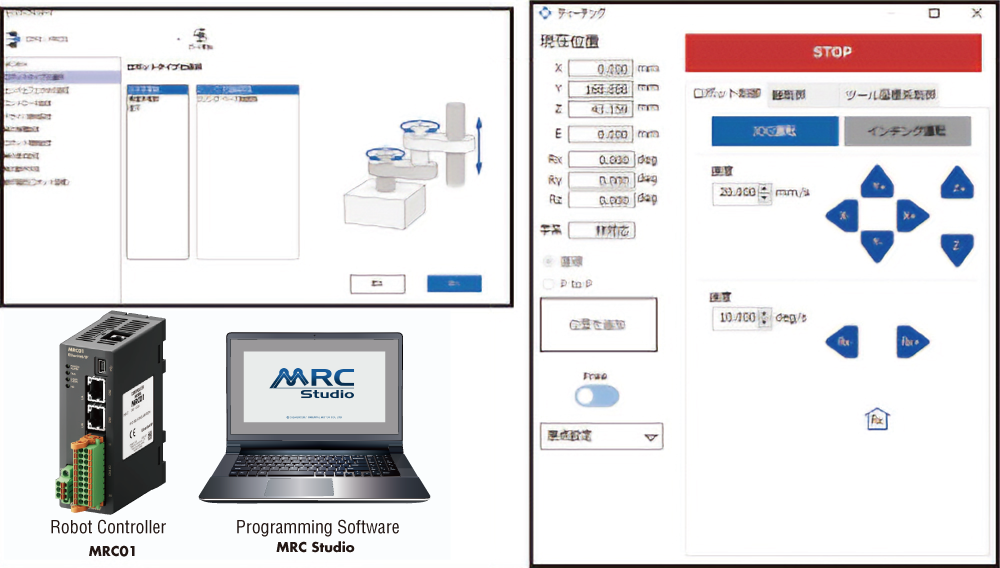
การจำลอง 3 มิติออนไลน์เพื่อตรวจสอบการทำงาน
โปรแกรมการทำงานของหุ่นยนต์ในบ้านสามารถตรวจสอบได้บนซิมูเลเตอร์ 3 มิติ โดยไม่ต้องขับมอเตอร์
การเชื่อมต่อกับ PLC โฮสต์ไม่จำเป็นสำหรับการจำลอง
สิ่งนี้ช่วยป้องกันไม่ให้หุ่นยนต์เคลื่อนที่ในทิศทางตรงข้ามหรือทำให้ตัวเองเสียหายจากการเคลื่อนไหวมากเกินไป
- ไม่สามารถใช้งานแบบออฟไลน์ได้

การควบคุมแกนของปลายมือ (end effector) ก็เป็นไปได้เช่นกัน
รองรับการทำงานกับหุ่นยนต์แขนกล (articulated robots), หุ่นยนต์ SCARA, และหุ่นยนต์ Cartesian ซึ่งเป็นโครงสร้างหุ่นยนต์อุตสาหกรรมทั่วไป
แกนของปลายมือ (end effector) ยังสามารถควบคุมได้โดย MRC01 ซึ่งช่วยประหยัดพื้นที่และการเดินสาย รวมถึงลดต้นทุนของระบบทั้งหมด
-
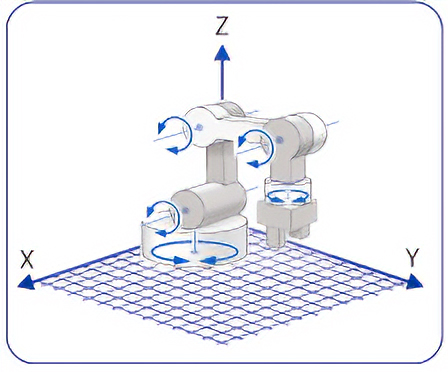
Articulated Robot -
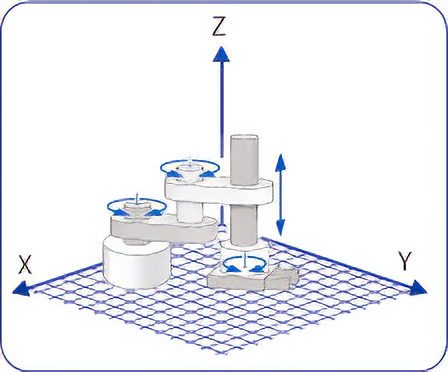
SCARA Robot -
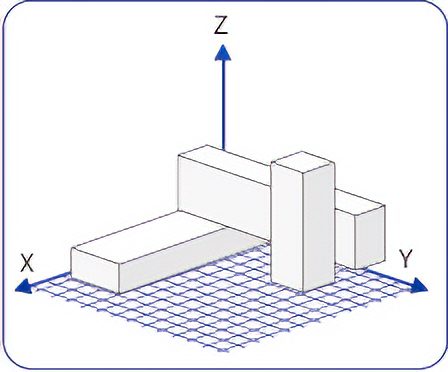
Cartesian Robot
- สำหรับข้อมูลเพิ่มเติมเกี่ยวกับหุ่นยนต์ที่เข้ากันได้ กรุณาอ้างอิงจากคู่มือการใช้งาน.
รองรับการทำงานกับผลิตภัณฑ์หลากหลายประเภท
พวกเขาสามารถใช้งานร่วมกับ AZ ซีรีส์ และกระบอกทำงานไฟฟ้าที่ติดตั้งอยู่ด้วย ความหลากหลายของผลิตภัณฑ์ช่วยให้คุณมีความยืดหยุ่นมากในการออกแบบประเภทหุ่นยนต์ที่คุณต้องการสร้างภายใน
AZ Series Driver
Built-in controller type
-

Single-Phase 100-120 V,
Single-Phase/Three-Phase 200-240 V -

24/48 VDC
mini driver RS-485 communication type

AZ Series motors, AZ Series equipped electric actuators
-

Motors -

Hollow Rotary Actuators
DGII Series -

Compact Electric Cylinders
DR Series
DRS2 Series
-

Electric Linear Slides
EZS Series
EAS Series
EZSH Series -

Electric Cylinders
EAC Series -

Rack-and-Pinion System
L Series -

Electric Grippers
EH Series
ผลิตภัณฑ์ที่ติดตั้งในตัว

ตัวควบคุมหุ่นยนต์ MRC01
ตัวควบคุมหุ่นยนต์นี้สามารถใช้เพื่อแนะนำและควบคุมหุ่นยนต์ภายในองค์กรได้อย่างง่ายดายใน 3 ขั้นตอน ได้แก่ "การตั้งค่าเริ่มต้น" "การเขียนโปรแกรมการทำงาน" และ "การตรวจสอบการทำงาน" สามารถเชื่อมต่อกับผลิตภัณฑ์ AZ ซีรีส์ หรือตัวขับเคลื่อนไฟฟ้าที่ติดตั้ง AZ ซีรีส์
แกนข้อต่อ, อุปกรณ์ปลายแขน
แกนข้อต่อ, อุปกรณ์ปลายแขน
AZ Series Equipped Products

ผลิตภัณฑ์ที่ติดตั้งใน αSTEP AZ ซีรีส์
เอ็นโค้ดเดอร์แบบสัมบูรณ์เชิงกลแบบหมุนหลายรอบ ช่วยลดจำนวนเซ็นเซอร์และขจัดความจำเป็นในการใช้แบตเตอรี่
ด้วย αSTEP AZ ซีรีส์ การใช้เซ็นเซอร์ภายนอก เช่น เซ็นเซอร์โฮม สามารถลดลงได้ ซึ่งช่วยให้การจัดวางมีความกะทัดรัดและมีการเดินสายที่น้อยลง เอ็นโค้ดเดอร์แบบสัมบูรณ์เชิงกลแบบหมุนหลายรอบ [ABZO] จะเก็บข้อมูลตำแหน่งไว้แม้ว่าแหล่งจ่ายไฟจะถูกตัดขาดจากการหยุดฉุกเฉินหรือการขัดข้องของไฟฟ้าในระหว่างการทำงานในการตั้งตำแหน่ง เนื่องจากมันเป็นแบบกลไก จึงไม่ต้องการแบตเตอรี่สำหรับการเก็บข้อมูล ไม่จำเป็นต้องกังวลเกี่ยวกับค่าใช้จ่ายในการซื้อแบตเตอรี่ ปัญหาที่เกิดขึ้นระหว่างการใช้งาน หรือช่วงเวลาการบำรุงรักษา นอกจากนี้ มอเตอร์ AZ ซีรีส์ เองยังสามารถทำหน้าที่เป็นเซ็นเซอร์และตรวจสอบสถานะของหุ่นยนต์ได้ในเชิงตัวเลขอีกด้วย

เหมาะสมสำหรับแกนข้อต่อที่ใช้กระบอกหมุนแบบหลุมและประเภทเกียร์ขนาดกะทัดรัด
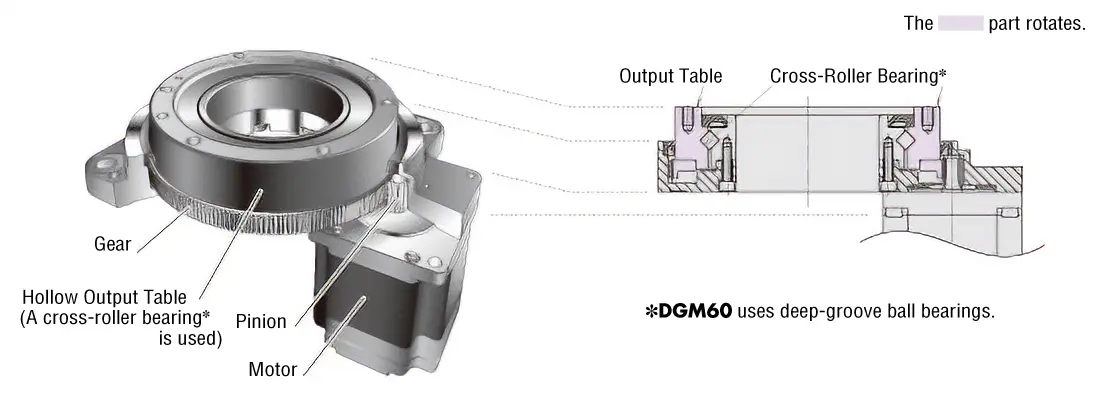
แอคชูเอเตอร์แบบหมุน DGII ซีรีส์ (แกนที่ 1, แกนที่ 2)
หุ่นยนต์ SCARA สร้างแรงบิดสูงเมื่อจับโหลดที่ปลายแขนห่างจากแกนที่ 1
DGII ซีรีส์ ใช้ตลับลูกปืนแบบลูกกลิ้งข้าม (crossed roller bearings) สำหรับโต๊ะเอาท์พุตแบบหลุมเพื่อให้มีแรงบิดที่ยอมรับได้สูง ซึ่งช่วยขยายช่วงการเคลื่อนไหวของแขน
นอกจากนี้ รูหลุม (through-hole) ยังสามารถใช้สำหรับการเดินสายเคเบิลที่มีเส้นทางซับซ้อน ช่วยให้การออกแบบอุปกรณ์ง่ายขึ้น


αSTEP AZ ซีรีส์ ประเภทเกียร์ฮาร์มอนิก (แกนที่ 3)
แม้แต่การเบี่ยงเบนเล็กน้อยก็อาจกลายเป็นเรื่องใหญ่ที่ปลายแขน ทำให้ไม่สามารถจับของได้อย่างแม่นยำ ประเภทที่มีเกียร์ฮาร์มอนิกไม่มีการย้อนกลับ ทำให้ลดการเบี่ยงเบนและรับรองการทำงานที่แม่นยำ

แอคชูเอเตอร์ขนาดกะทัดรัดและน้ำหนักเบาที่ช่วยลดภาระบนปลายกลไกของหุ่นยนต์
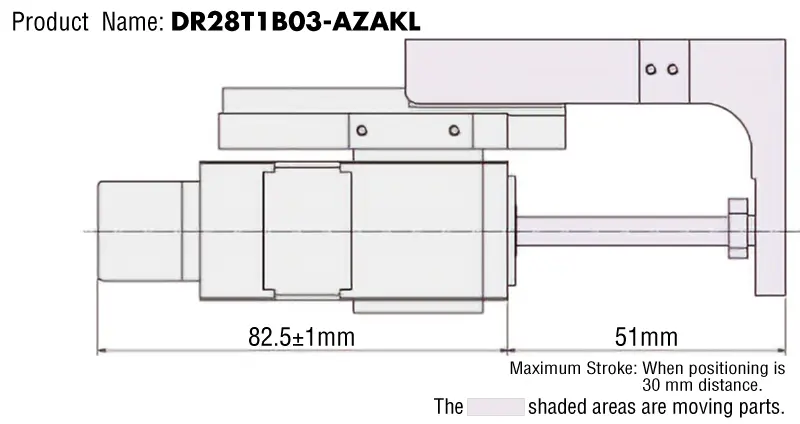
ไซลินเดอร์แอคชูเอเตอร์ขนาดกะทัดรัด DR ซีรีส์ (แกนที่ 4)
ตัวเครื่องขนาดกะทัดรัดที่รวม αSTEP และบอลสกรูเข้าด้วยกันสามารถช่วยลดขนาดของอุปกรณ์และประหยัดพื้นที่ น้ำหนักที่ลดลงที่ปลายอุปกรณ์ช่วยเพิ่มความยืดหยุ่นในการออกแบบ
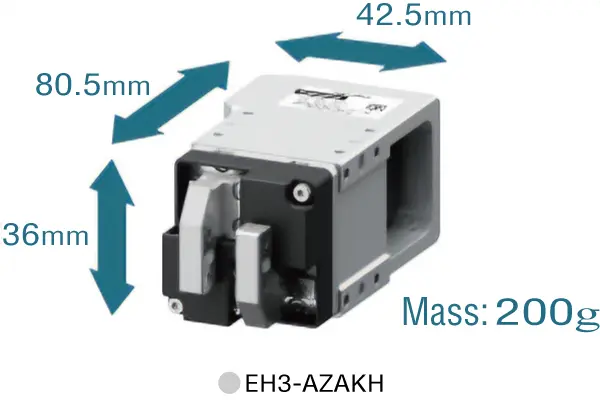
กริปเปอร์ไฟฟ้า EH ซีรีส์ (แกนที่ 5)
ยิ่งปลายมือ (end effector) มีขนาดกะทัดรัดและน้ำหนักเบามากเท่าใด ภาระต่อข้อต่อต่างๆ จะยิ่งลดลง ซึ่งส่งผลให้หุ่นยนต์ทั้งหมดมีขนาดเล็กลงและมีต้นทุนต่ำลง
ด้วยกริปเปอร์ไฟฟ้า สามารถตั้งค่าตำแหน่ง เวลาในการจับ และแรงในการจับได้อย่างอิสระ ทำให้สามารถจับวัตถุในรูปแบบต่างๆ ได้

ผลิตภัณฑ์ที่ติดตั้งในตัว

แอคชูเอเตอร์แบบหมุน
DGII ซีรีส์
นี่คือผลิตภัณฑ์ที่รวมกันของโต๊ะหมุนแบบกลวงและ αSTEP การขับเคลื่อนด้วยพลังงานสูงเป็นไปได้เนื่องจากกลไกการลดความเร็วภายในตัวกระตุ้น

αSTEP AZ ซีรีส์ ที่มีเซนเซอร์เอ็นโค้ดเดอร์แบบสัมบูรณ์ในตัวโดยไม่ใช้แบตเตอรี่
αSTEP ซึ่งใช้การควบคุมแบบวงปิดที่เป็นเอกลักษณ์ของ โอเรียนทัล มอเตอร์ มาพร้อมกับเซ็นเซอร์ ABZO ที่พัฒนาขึ้นใหม่ ระบบสัมบูรณ์สามารถทำงานได้โดยไม่ต้องใช้แบตเตอรี่ นอกจากนี้ยังมีไดรเวอร์ที่รองรับเครือข่ายหลากหลายรูปแบบ เพื่อให้สามารถทำการจัดตำแหน่งขั้นสูงได้ในราคาที่เหมาะสม

ไซลินเดอร์แอคชูเอเตอร์ขนาดกะทัดรัด
DR ซีรีส์
αSTEP และบอลสกรูถูกผสมผสานกัน ทำให้สามารถควบคุมตำแหน่งได้อย่างแม่นยำในขนาดโครงสร้างที่กะทัดรัด มีขนาดการติดตั้ง 20 มม. และ 28 มม. มีตัวเลือกกลไกหลากหลายประเภทและฟังก์ชันเพิ่มเติม พร้อมเซ็นเซอร์ ABZO เพื่อช่วยประหยัดพื้นที่และการเดินสายที่ง่าย

กริปเปอร์ไฟฟ้า EH ซีรีส์
กริปเปอร์ไฟฟ้านี้ผสมผสานกลไกแบบแร็คแอนด์พิเนียนและ αSTEP AZ ซีรีส์ ทำให้สามารถจับยึดวัตถุได้อย่างละเอียดอ่อนเหมือนปลายนิ้วของมนุษย์ และช่วยในการทำงานอัตโนมัติและการประหยัดแรงงาน