






EH ซีรี่ส์ พร้อม AZ ซีรี่ส์

การยึดเกาะ : มีแรงยึดจับได้ซึ่งสามารจับภาระเสียรูปหรือแตกหักง่ายได้
ตั้งค่าแรงจับ เวลาจับ และความเร็วได้อย่างอิสระตามวัตถุที่กำลังจับ
ยึดจับวัตถุที่แตกหักง่ายได้อย่างปลอดภัยและเชื่อถือได้ เช่น แก้ว และวัตถุที่เปลี่ยนรูปได้ง่าย เช่น พลาสติกและฟองน้ำs
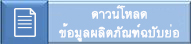
เข้าที่รวดเร็ว จับช้า
มอเตอร์เข้าใกล้โหลดด้วยความเร็วสูงมอเตอร์จะชะลอตัวก่อนกระแทกพื้นผิวด้วยความเร็วต่ำ
จับที่แรงยึดเกาะต่ำ แล้วค่อยๆ เพิ่มแรง
แรงกดและเวลาสามารถเปลี่ยนได้อย่างง่ายดาย

ลักษณะของแรงจับระหว่างการเคลื่อนไหวแบบกด
การเคลื่อนที่ในการยึดจับของกริปเปอร์ไฟฟ้าขึ้นอยู่กับการทำงานของการเคลื่อนที่แบบกด แรงกด (แรงจับยึด) ถูกตั้งค่าตามกระแสที่กำลังวิ่งของมอเตอร์

พิกัด : สามารถประสานทิศทางและตำแหน่งของโหลดได้
ปริมาณการหนีบคือ 0.02 มม. ดังนั้นทิศทางและตำแหน่งของน้ำหนักจึงสามารถประสานกันได้โดยการจับยึดตามขนาด

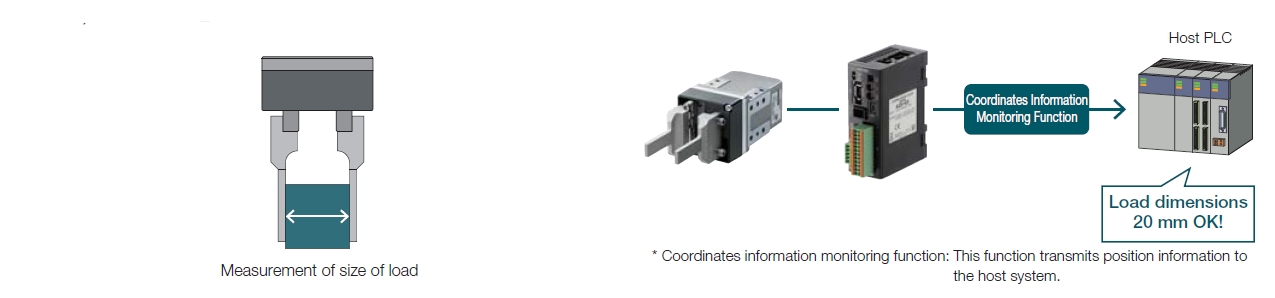
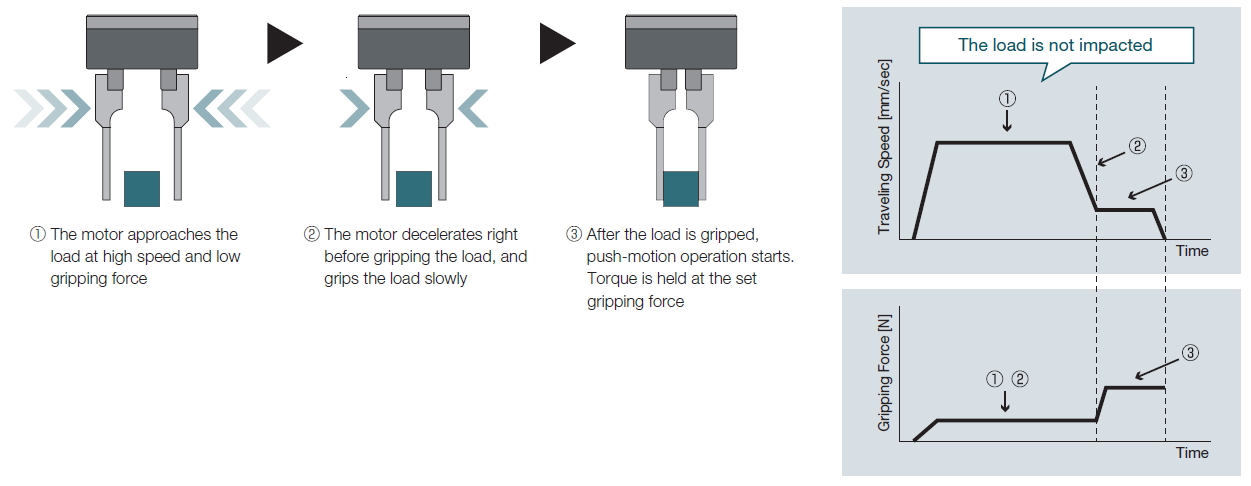
การวัด : สามารถยืนยันขนาดของโหลดได้โดยไม่ต้องใช้เซ็นเซอร์ภายนอก
ขนาดและการแสดงตนของโหลดจะถูกกำหนดภายในช่วงการทำงานของที่หนีบ
ช่วงการทำงานของที่หนีบได้รับการยืนยันโดยสัญญาณเอาท์พุต (เอาต์พุต TLC, เอาต์พุต AREA) จากไดรเวอร์ ทำให้สามารถกำหนดขนาดและการมีอยู่ของโหลดได้
ตรวจสอบข้อมูลตำแหน่งจากกริปเปอร์เพื่อวัดขนาด
ข้อมูลพิกัดของไดรเวอร์ ฟังก์ชันการตรวจสอบโหลด พิกัดข้อมูลจากกริปเปอร์ไฟฟ้าไปยังโฮสต์ PLC ทำให้สามารถวัดขนาดของโหลดได้