กรณีศึกษาการผลิตภายในองค์กรหุ่นยนต์ขันสกรูอัตโนมัติ
ตัวอย่างจริงจากโรงงานผลิตของโอเรียนทัล มอเตอร์ เกี่ยวกับอุปกรณ์การขันสกรูที่ใช้ในการอธิบายจุดประสงค์ในการนำผลิตภัณฑ์มาใช้
นอกจากนี้ บริษัท โอเรียนทัล มอเตอร์ ยังให้บริการสนับสนุนการออกแบบอุปกรณ์อีกด้วย กรุณาติดต่อ โอเรียนทัล มอเตอร์ ได้อย่างสบายใจหากคุณมีคำถามใด ๆ
ตัวอย่างจริงของอุปกรณ์การขันสกรู
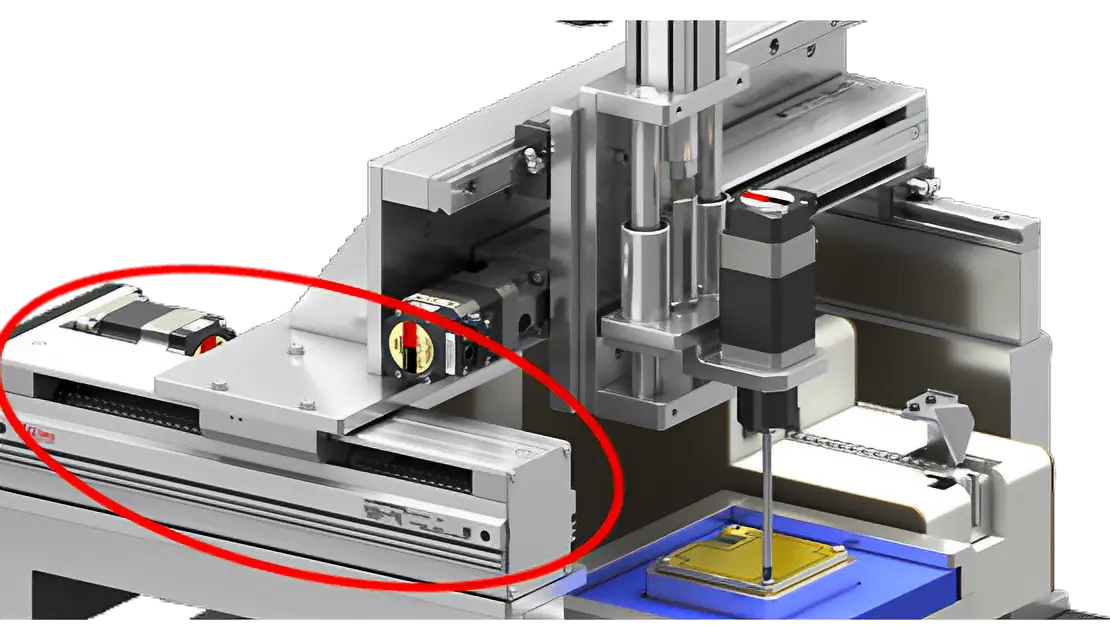
ภาพรวมของอุปกรณ์
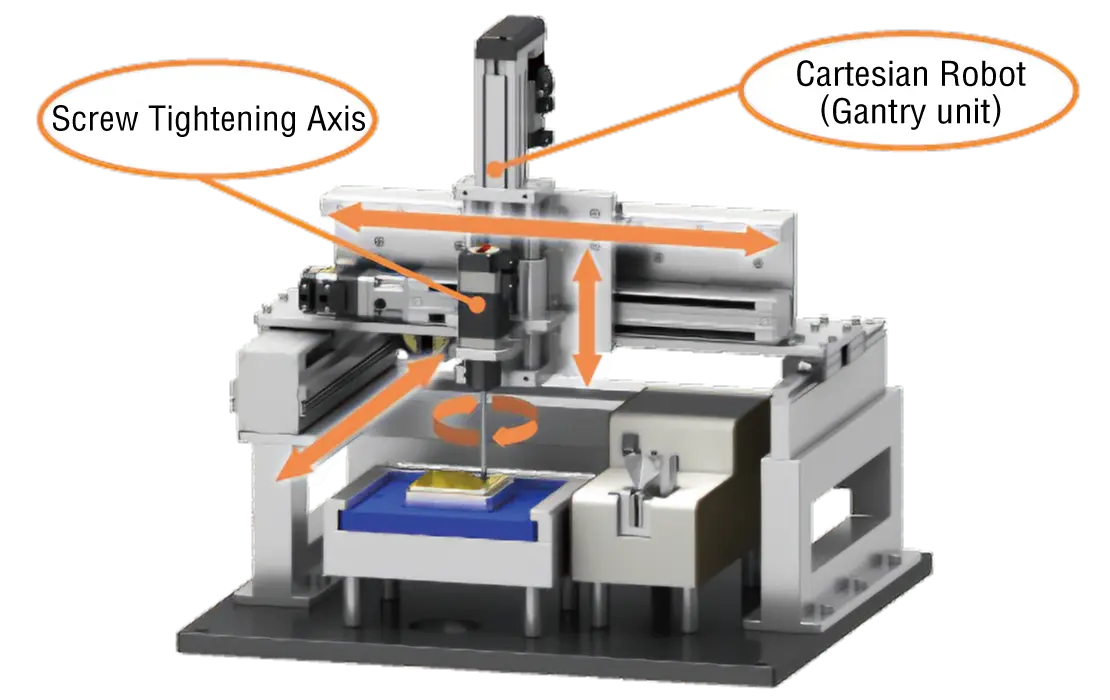
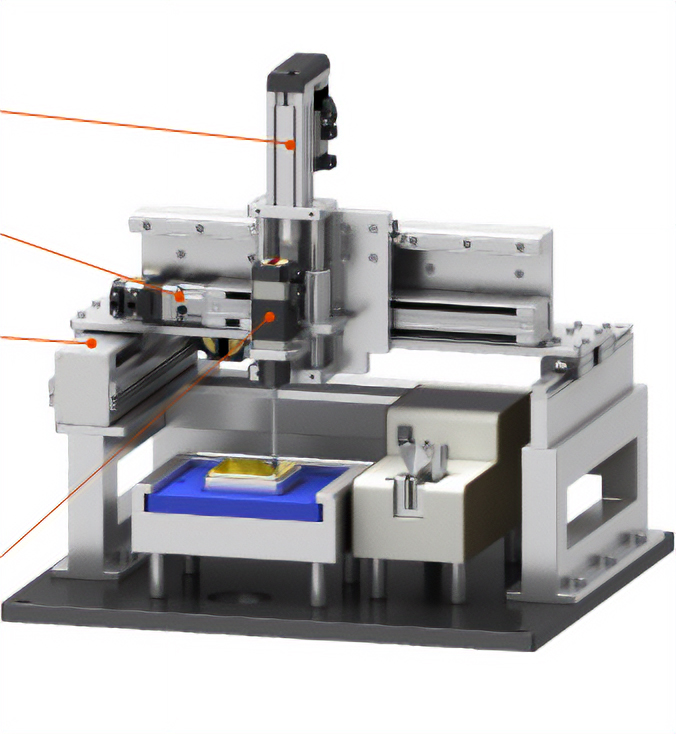
นี่คืออุปกรณ์สำหรับการขันสกรูที่ประกอบด้วยหุ่นยนต์คาร์ทีเซียน (gantry unit) และแกนการขันสกรู
หุ่นยนต์คาร์ทีเซียน (gantry unit) เคลื่อนที่เพื่อให้ตรงกับตำแหน่งของสกรูทั้ง 4 ตัว และมอเตอร์ AZ ซีรีส์ จะทำการขันสกรูเหล่านั้นให้แน่น
อุปกรณ์นี้ทำให้สามารถทำการขันสกรูโดยอัตโนมัติ ซึ่งเคยทำด้วยมือมาก่อน และยังช่วยให้ขนาดอุปกรณ์มีความกะทัดรัดมากขึ้น ลดภาระงานของคนงาน และทำให้เวลาทำงานมีความสม่ำเสมอมากขึ้นอีกด้วย
| Number of Axes | 4 axes |
|---|---|
| Cycle Time | 23.0 s (4-point screw tightening) |
| Stroke | Axis 1 (x) 125 mm/s |
| Axis 2 (y) 250 mm/s | |
| Axis 3 (z) 50 mm/s | |
| Axis 4 (screw tightening) 420 r/min | |
| Screw Tightening Possible Range | W200 mm×D150 mm×H50 mm |
| Main Power Supply | 100 VAC* |
* แหล่งจ่ายไฟสำหรับการขับเคลื่อนและควบคุมไดรเวอร์คือ 24 VDC
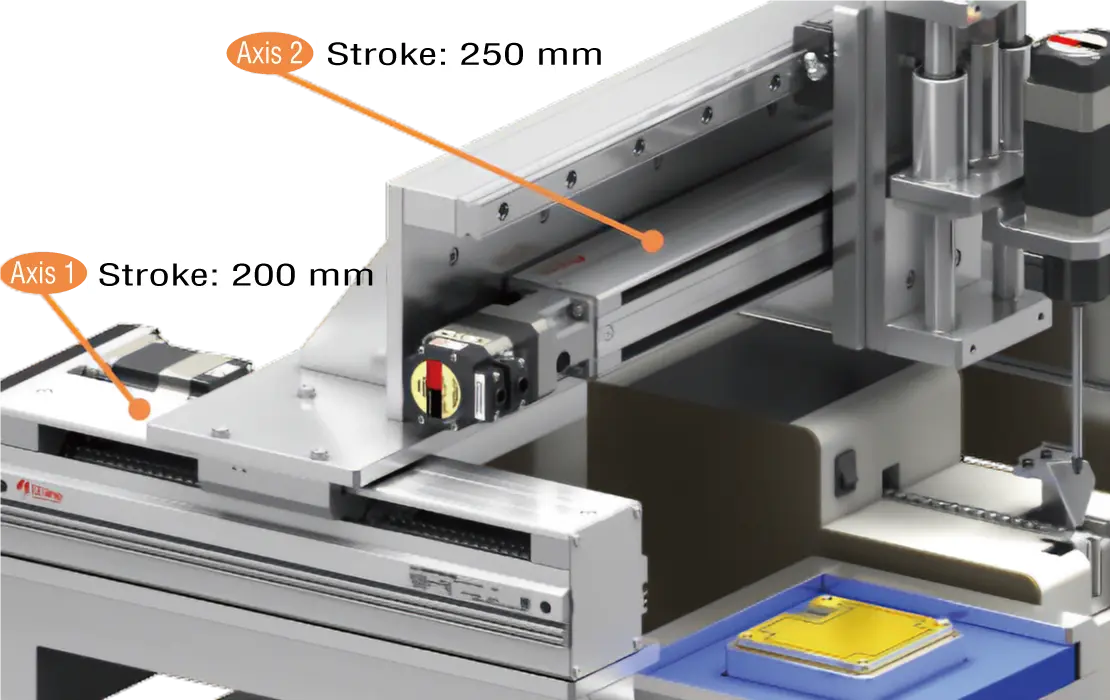
หุ่นยนต์คาร์ทีเซียน (Gantry units)
| Product stroke | Maximum speed | Repetitive Positioning Accuracy | |
|---|---|---|---|
| Axis 1 (x) | 200 mm | 230 mm/s | ±0.02 mm |
| Axis 2 (y) | 250 mm | 400 mm/s | ±0.02 mm |
| Axis 3 (z) | 50 mm | 280 mm/s | ±0.02 mm |
แกนการขันสกรู
| Maximum Screw Tightening Torque | 0.77 N·m |
|---|
สัมภาษณ์นักออกแบบอุปกรณ์ภายใน: ประเด็นสำคัญของหุ่นยนต์คาร์ทีเซียน (Gantry units) สำหรับอุปกรณ์ขันสกรู
สามารถทำการขันสกรูอัตโนมัติได้โดยใช้พื้นที่ติดตั้งน้อยที่สุดและไม่ทำให้การไหลของสายการผลิตหยุดชะงัก
เพื่อทำให้กระบวนการขันสกรูเป็นอัตโนมัติ มีปัญหาการออกแบบเช่น "ขนาดของอุปกรณ์ใหญ่เกินไปเมื่อเปรียบเทียบกับน้ำหนักสำหรับผลิตภัณฑ์เชิงพาณิชย์" และ "เราต้องการลดต้นทุน" โอเรียนทัล มอเตอร์ ได้แก้ปัญหานี้โดยการผลิตหุ่นยนต์คาร์ทีเซียน (gantry unit) ภายในบริษัทเอง
【ข้อมูลพื้นฐานเกี่ยวกับการเลือกหุ่นยนต์คาร์ทีเซียน (gantry unit)】
- โดยการใช้แอคชูเอเตอร์ไฟฟ้าที่มีการเคลื่อนที่ตรงกับน้ำหนักที่ต้องการ การขันสกรูสามารถทำให้เป็นอัตโนมัติในพื้นที่ที่น้อยที่สุด
- ด้านแกนหลัก (แกน XYZ) จะเคลื่อนที่ ทำให้สามารถสร้างสายการผลิตที่ไม่หยุดชะงักได้
ลักษณะของประตูแบบมีโต๊ะเลื่อน [มุมมองจากด้านบน]
| พื้นที่ติดตั้งที่ต้องการ: | กว้างกว่าหุ่นยนต์คาร์ทีเซียน (gantry units) ต้องการพื้นที่สำหรับการเคลื่อนไหวของโต๊ะ โดยไม่คำนึงถึงขนาดของน้ำหนัก |
|---|---|
| การไหลของสายการผลิต: | เกิดกระบวนการ 2 ขั้นตอน (① สายพานลำเลียง → โต๊ะ, ② โต๊ะ → สายพานลำเลียง) |
![Features of gate-type with moving table [top view]](/sites/default/files/image/solutions/casestudies/in-house-machine/05/in-house-machine-05_02.webp)
คุณสมบัติของหุ่นยนต์คาร์ทีเซียน (gantry units) [มุมมองจากด้านบน]
| พื้นที่ติดตั้งที่ต้องการ: | แคบกว่าแบบประตู การใช้แอคทูเอเตอร์ไฟฟ้าที่มีระยะการเคลื่อนที่เหมาะสมกับน้ำหนักช่วยประหยัดพื้นที่ในการติดตั้ง |
|---|---|
| การไหลของเส้น: | ไม่หยุดนิ่ง |
![Features of the cartesian robot (gantry unit) [top view]](/sites/default/files/image/solutions/casestudies/in-house-machine/05/in-house-machine-05_03.webp)
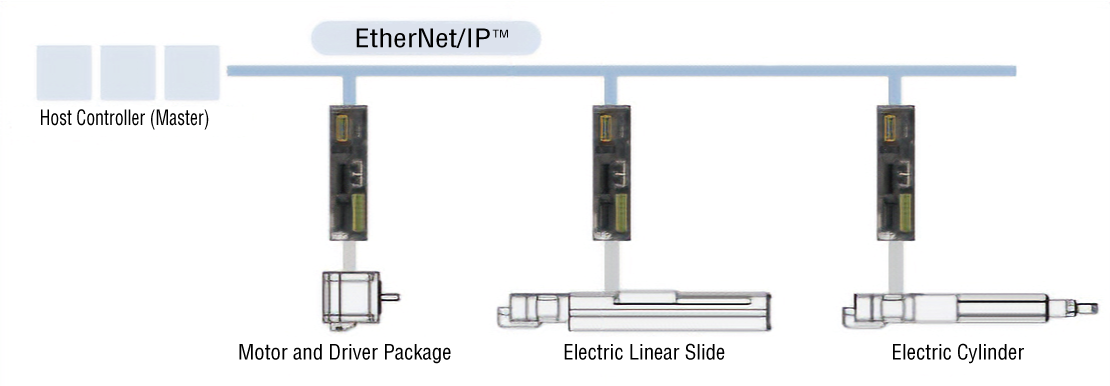
การกำหนดค่าระบบ
แต่ละแกนถูกควบคุมโดย EtherNet/IP/p>
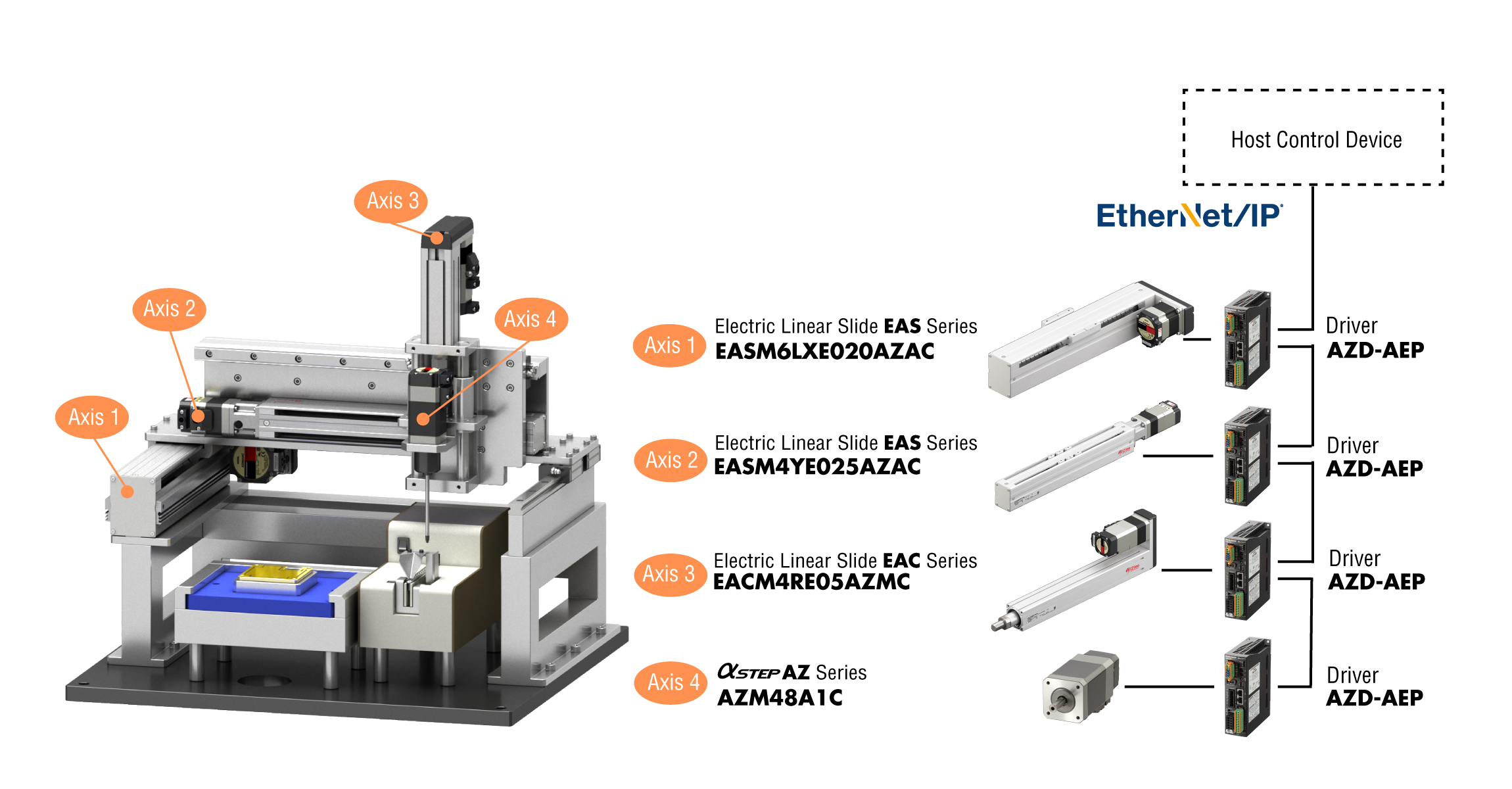
คุณสามารถสร้างหุ่นยนต์ของคุณเองได้อย่างง่ายดายด้วย AZ ซีรีส์
และยังมีตัวควบคุมหุ่นยนต์ที่สามารถตั้งค่าและโปรแกรมได้อีกด้วย

* MRC01 ไม่ได้ถูกใช้ในตัวอย่างนี้ของการผลิตอุปกรณ์ภายในองค์กร.
รายการส่วนประกอบ
| Product Name | ||
|---|---|---|
| Axis 1 | Electric Linear Slides | EASM6LXE020AZAC |


|
EtherNet/IP Compatible Drivers | AZD-AEP |
| Connection Cable | CC050VZF | |
| DC Power Supply Cable | CC02D010-3 | |
| Axis 2 | Electric Linear Slides | EASM4YE025AZAC |

|
EtherNet/IP Compatible Drivers | AZD-AEP |
| Flexible Connection Cable | CC050VZR | |
| DC Power Supply Cable | CC02D010-3 | |
| Axis 3 | Electric Cylinders | EACM4RE05AZMC |

|
EtherNet/IP Compatible Drivers | AZD-AEP |
| Flexible Connection Cable | CC050VZRB | |
| DC Power Supply Cable | CC02D010-3 | |
| Axis 4 | αSTEP | AZM48A1C |

|
EtherNet/IP Compatible Drivers | AZD-AEP |
| Flexible Connection Cable | CC050VZR | |
| DC Power Supply Cable | CC02D010-3 | |
- * EtherNet/IP™ is a trademark of ODVA.
- * All motor cables are 5 m in length.
- * All DC power supply cables are 3 m in length.

Axis 1, Axis 2
Electric Linear Slide EAS Series

Axis 3
Electric Cylinder EAC Series

Axis 4
αSTEP AZ Series

แกน ①② หุ่นยนต์คาร์ทีเซียน (Gantry unit [แกน X และ Y])
<โมเมนต์ที่ยอมรับได้สูง> อิเล็กทริกลิเนียร์ EAS ซีรีส์
การออกแบบที่มีความแข็งแรงสูงช่วยลดข้อบกพร่องของผลิตภัณฑ์ (เช่น การเกิดรอยบิ่นจากสกรูและข้อผิดพลาดในการวางตำแหน่ง)
หากความแข็งแกร่งของกลไกต่ำ อาจไม่สามารถทนต่อแรงตอบสนองจากการขันสกรูได้ และกลไกทั้งหมดอาจเกิดการเบี่ยงเบนได้ การเบี่ยงเบนของกลไกทั้งหมดอาจทำให้เกิดข้อบกพร่อง เช่น การเกิดรอยขีดข่วนหรือข้อผิดพลาดในการจัดตำแหน่งของสกรู
EAS ซีรีส์ ที่มีความแข็งแรงสูงช่วยลดการเบี่ยงเบนของอุปกรณ์และมีส่วนช่วยในการลดข้อบกพร่องของผลิตภัณฑ์
สำหรับ EAS6
แม้เมื่อความยื่นออกมีความยาว 1 เมตร แรงกดสูงสุดที่อนุญาตคือ 110 นิวตัน
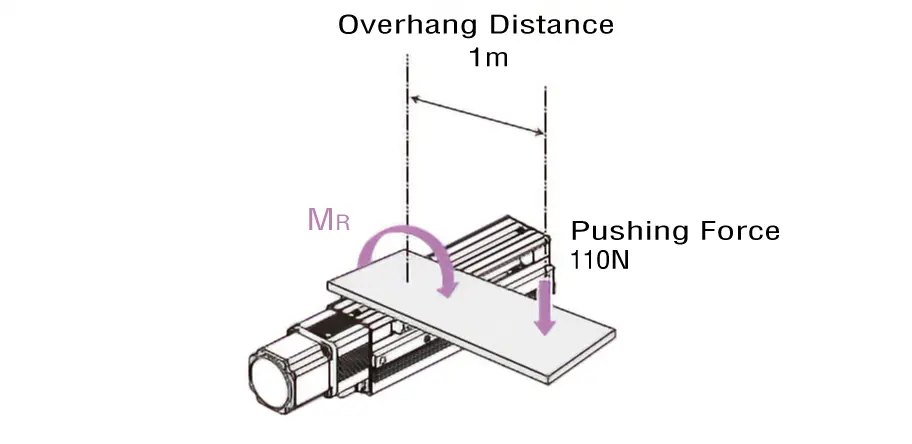
แรงกดและค่าบรรทุกจะคำนวณจากโมเมนต์ที่ยอมรับได้ในสถานะนิ่งของ EAS6 ซึ่งคือ 110.0 N·m (ไม่รวมถึงน้ำหนักของแผ่น)
ค่าโมเมนต์ที่อนุญาต
| Model | Static permissible moment*1 [N·m] | Dynamic permissible moment*2 [N·m] |
|---|---|---|
| EAS6 | MP: 86.0 MY: 34.0 MR: 110.0 |
MP: 31.8 MY: 10.3 MR: 40.6 |
| EAS4 | MP: 58.3 MY: 16.0 MR: 53.3 |
MP: 16.3 MY: 4.8 MR: 15.0 |
- *1 Load moment that the linear guide can support while the motor is stopped
- *2 Load moment that the linear guide can support while the motor is in operation
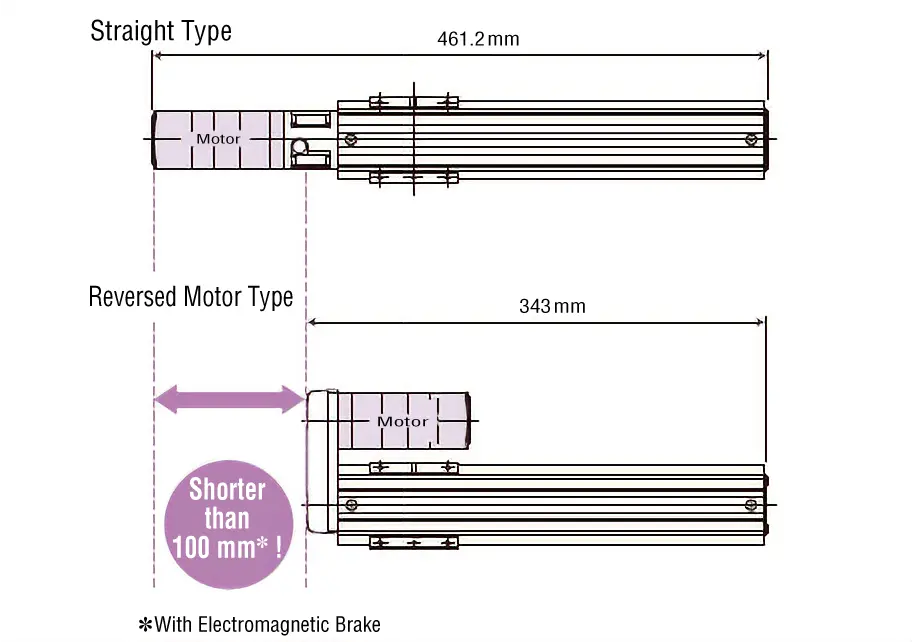
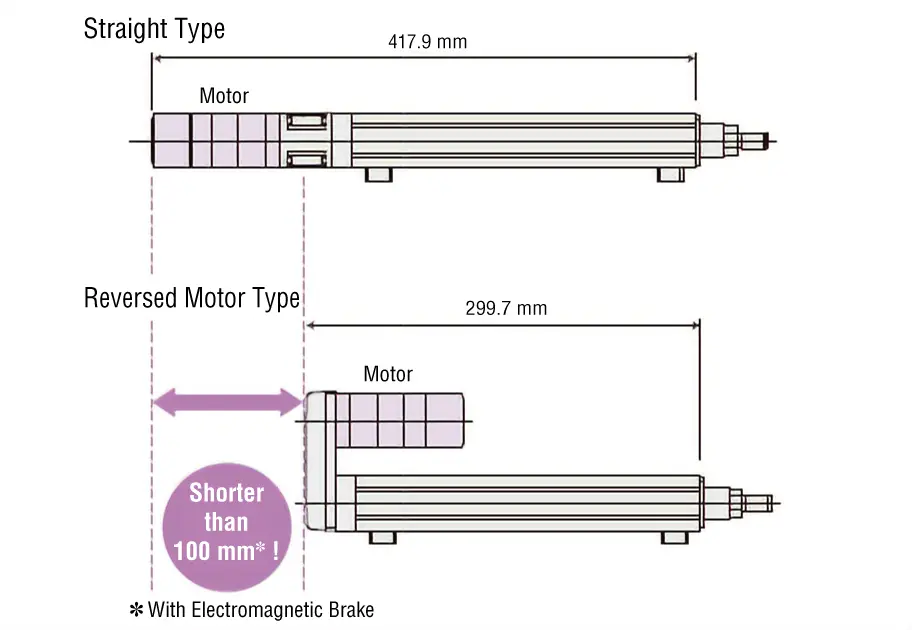
การออกแบบมอเตอร์แบบพับเก็บได้ทำให้เครื่องมือมีขนาดกะทัดรัดโดยรวม
การใช้ลิเนียร์สไลด์แบบมอเตอร์ย้อนกลับที่มีความยาวโดยรวมสั้น ได้ทำให้การออกแบบอุปกรณ์มีความกะทัดรัดมากขึ้น สิ่งนี้ทำให้ลิเนียร์สไลด์สามารถเข้ากับข้อจำกัดความกว้างของอุปกรณ์ในสายการผลิตได้
มุมมองของหุ่นยนต์คาร์ทีเซียน (Gantry Unit) จากด้านแกน X
เบรกแม่เหล็กไฟฟ้าแบบ EAS4 ขนาด 200 มม.
ความยาวของสโตรคที่หลากหลายเพื่อความยืดหยุ่นในการผสมผสาน
ซีรีส์ EAS มีให้เลือกหลากหลายขนาดของสโตรคตั้งแต่ 50 มม. ถึง 850 มม. โดยเพิ่มขึ้นทีละ 50 มม. สามารถรวมแกน X และ Y ตามความเหมาะสมกับขนาดของโหลดได้
ผลิตภัณฑ์ที่ติดตั้งภายใน

อิเล็กทริกลิเนียร์ EAS ซีรีส์
ส่วนมอเตอร์มีการติดตั้ง αSTEP AR ซีรีส์ และ AZ ซีรีส์ ที่มีประสิทธิภาพสูงและประหยัดพลังงาน มี 2 ประเภทของส่วนเลื่อนเชิงเส้นที่มีให้เลือก: ประเภทตรงและประเภทมอเตอร์ย้อนกลับ สำหรับการใช้งานที่เกี่ยวกับการขนส่งและการยกของ กรุณาเลือกจาก EAS ซีรีส์ ก่อนเป็นอันดับแรก
สินค้าที่เกี่ยวข้อง

Electric Linear Slides EZS Series
<การออกแบบที่มีความแข็งแรงสูงช่วยลดข้อบกพร่องของผลิตภัณฑ์ (การขูดสกรูและการเบี้ยว)>
ส่วนของมอเตอร์ติดตั้งด้วย αSTEP ที่มีประสิทธิภาพสูงและประหยัดพลังงาน
AR ซีรีส์ และ AZ ซีรีส์ มี 2 ประเภทของส่วนเลื่อนเชิงเส้นที่มีให้เลือก: ประเภทตรงและประเภทมอเตอร์ย้อนกลับ โครงสร้างที่ทนต่อฝุ่นอย่างง่ายซึ่งทำจากแผ่นสแตนเลสช่วยป้องกันการเข้ามาของอนุภาคต่างประเทศและลดการปล่อยฝุ่นออกมา
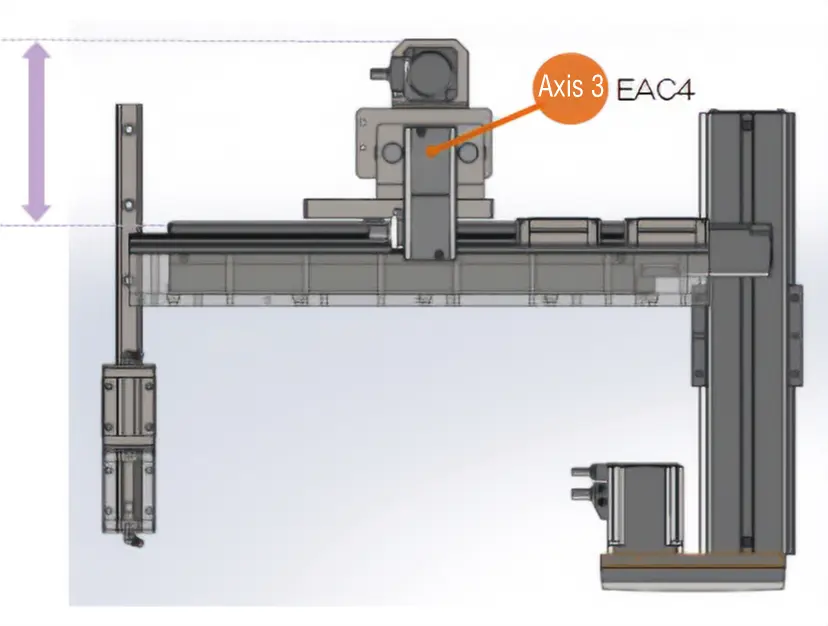
แกนที่③ หุ่นยนต์คาร์ทีเซียน (Gantry unit [แกน Z])
อิเล็กทริกไซลินเดอร์ EAC ซีรีส์
ลดการยื่นออกของแกน Z และชิ้นส่วนที่ต้องขันสกรู
กระบอกสูบไฟฟ้ามีโครงสร้างที่บางกว่าลิเนียร์สไลด์ไฟฟ้า ซึ่งช่วยลดการยื่นออกของอุปกรณ์
นอกจากนี้ การใช้มอเตอร์ประเภทย้อนกลับที่มีความยาวรวมสั้นช่วยให้การออกแบบอุปกรณ์มีความกระทัดรัดมากขึ้น
มุมมองด้านบนของอุปกรณ์ขันสกรู
EAC4 ประเภทเบรกแม่เหล็กไฟฟ้าสำหรับสโตรค 200 มม.
กดด้วยแรงที่เหมาะสมเมื่อขันสกรู
ฟังก์ชันการทำงานแบบกดที่ช่วยให้ตั้งค่าการจำกัดแรงบิดได้ จะทำการกดสกรูด้วยแรงที่เหมาะสม โดยสามารถจำกัดแรงกดได้โดยการตั้งกระแสการกด
ค่าขีดจำกัดแรงดันสูงสุดและค่าขีดจำกัดกระแสที่ใช้ในการดัน (ค่าที่อ้างอิง)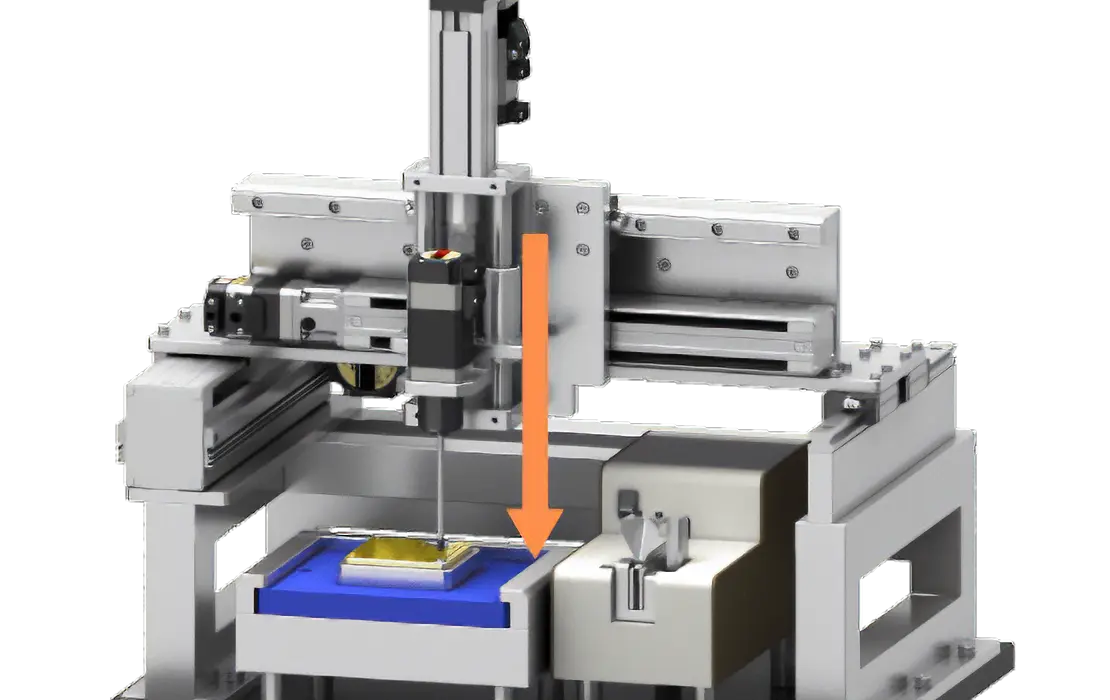
ผลิตภัณฑ์ที่ติดตั้งภายใน

Electric Cylinder EAC Series
ส่วนมอเตอร์ได้รับการติดตั้งด้วย αSTEP ที่มีประสิทธิภาพสูงและประหยัดพลังงาน AR ซีรีส์ และ AZ ซีรีส์ มีรูปแบบของกระบอกสูบ 2 ประเภทที่มีให้เลือก: ประเภทตรงและประเภทมอเตอร์กลับ สำหรับการใช้งานที่ต้องดันและขนย้าย ให้เลือกจากซีรีส์ EAC ก่อนเป็นอันดับแรก
แกน④ เครื่องขันสกรู
αSTEP AZ ซีรีส์
จำกัดแรงบิดที่เกิดขึ้นเพื่อป้องกันการสึกกร่อนและการขันสกรูแน่นเกินไป
ฟังก์ชันการทำงานแบบกดที่ช่วยให้ตั้งค่าการจำกัดแรงบิดได้ ช่วยป้องกันความเสียหายจากการขันสกรูแน่นเกินไป นอกจากนี้ ยังมีฟังก์ชัน TLC ซึ่งเป็นเอาต์พุตเมื่อถึงค่าการจำกัดแรงบิด และฟังก์ชันการตรวจสอบ. Also,ฟังก์ชันการตรวจสอบ สามารถใช้เพื่อตรวจสอบความผิดปกติต่างๆ เช่น 'การติดขัดของสกรู' และ 'ข้อผิดพลาดของตำแหน่งสกรู' ที่อาจทำให้เกิดข้อบกพร่องในผลิตภัณฑ์
แนะนำมอเตอร์ที่สมบูรณ์แบบสำหรับการปรับแรงบิดและแรงตึง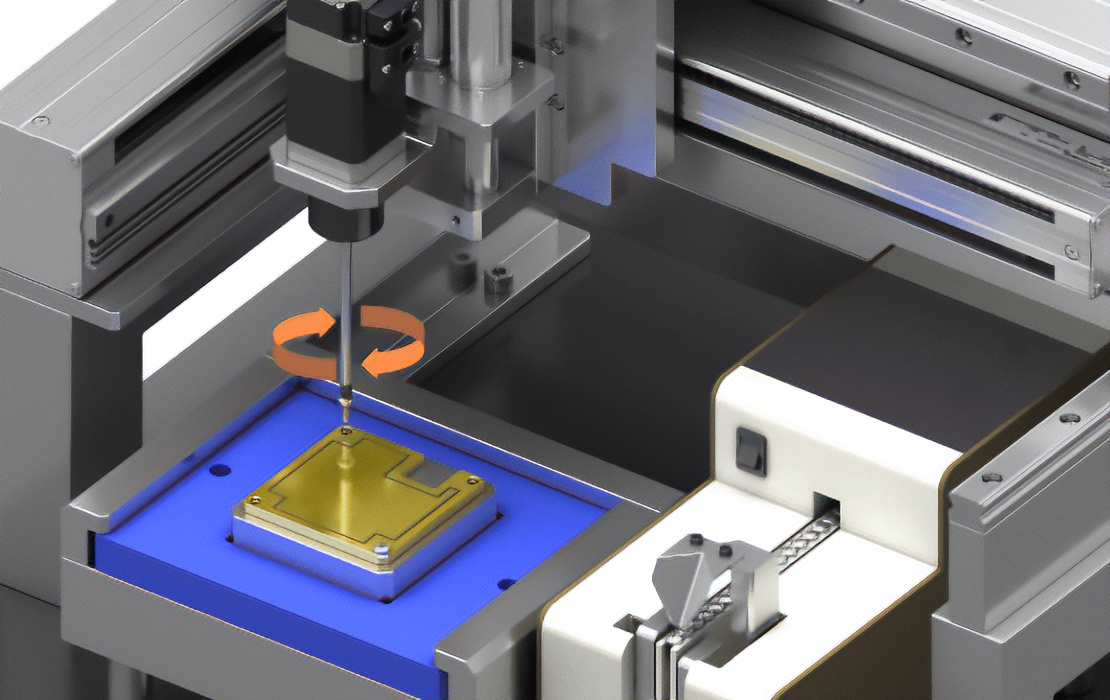
ผลิตภัณฑ์ที่ติดตั้งภายใน

เอ็นโค้ดเดอร์แบบสัมบูรณ์แบบไม่ใช้แบตเตอรี่ αSTEP AZ ซีรีส์
αSTEP ซึ่งใช้การควบคุมวงปิดที่เป็นเอกลักษณ์ของ โอเรียนทัล มอเตอร์ มาพร้อมกับเซ็นเซอร์ ABZO ที่พัฒนาขึ้นใหม่
ระบบที่มีความแม่นยำแบบสัมบูรณ์ในปัจจุบันไม่ต้องใช้แบตเตอรี่ นอกจากนี้ยังมีไดรเวอร์ที่เข้ากันได้กับเครือข่ายหลากหลายรุ่นเพื่อให้สามารถทำตำแหน่งที่มีความก้าวหน้าในราคาที่เหมาะสม
ใช้ได้กับทุกแกน
αSTEP AZ ซีรีส์ ไดรเวอร์ที่รองรับ EtherNet/IP™
การควบคุมมอเตอร์จากเครือข่าย
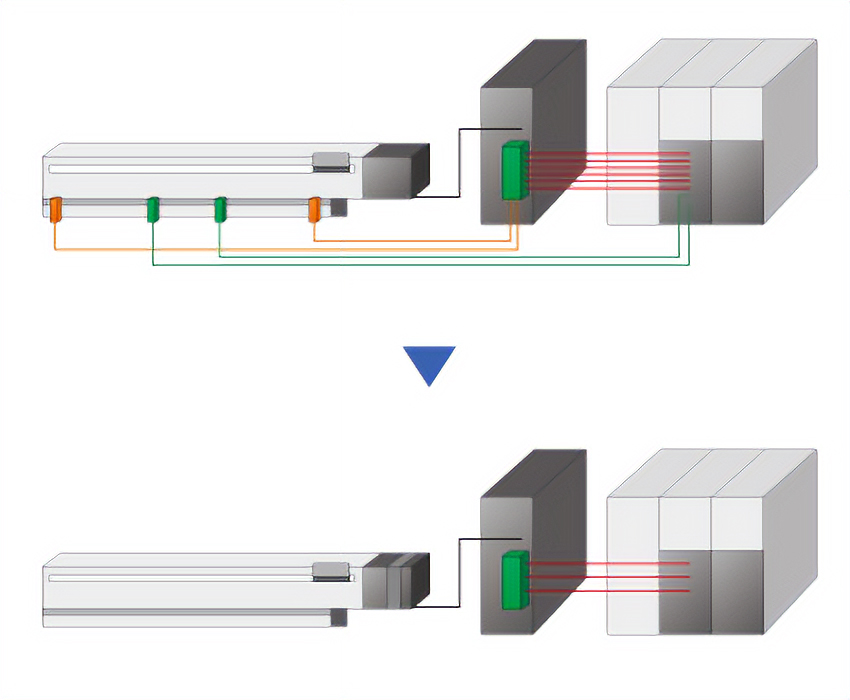
สามารถควบคุมได้โดยตรงจากเครือข่าย การเชื่อมต่อระหว่างอุปกรณ์ควบคุมหลักและไดรเวอร์ที่รองรับ EtherNet/IP™ จะใช้สายเคเบิลการสื่อสาร EtherNet/IP™ เพียงเส้นเดียว ซึ่งช่วยลดการเดินสายได้
นอกจากนี้ยังมีผลิตภัณฑ์อื่นๆ ที่รองรับเครือข่ายอุตสาหกรรมต่างๆ
- EtherNet/IP™ เป็นเครื่องหมายการค้าของ ODVA
ไฟล์ EDS พร้อมใช้งาน
ไฟล์ EDS พร้อมใช้งานเพื่อช่วยให้การใช้ผลิตภัณฑ์ที่รองรับ EtherNet/IP™ ง่ายขึ้น ไฟล์ EDS สามารถดาวน์โหลดได้จากหน้ารายละเอียดผลิตภัณฑ์ที่เกี่ยวข้อง
αSTEP AZ ซีรีส์
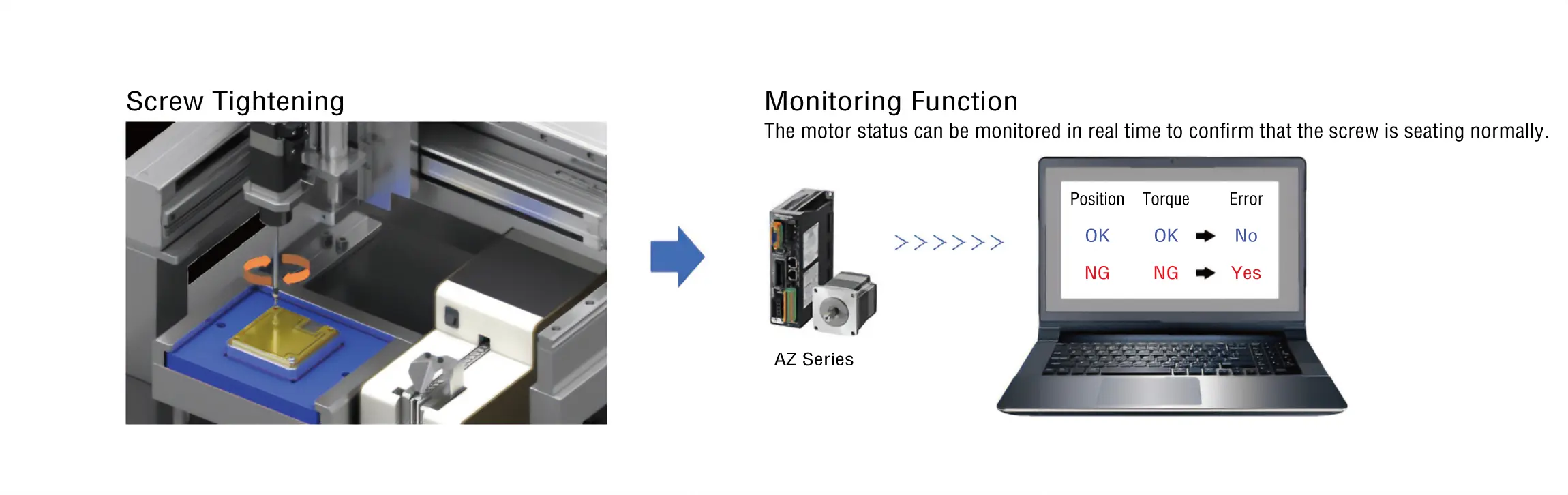
ตรวจจับสภาพอุปกรณ์และความผิดปกติในการขันสกรูที่ส่งผลให้เกิดความล้มเหลวของผลิตภัณฑ์
AZ ซีรีส์ สามารถตรวจสอบตำแหน่งมอเตอร์ ปัจจัยการโหลด และอื่นๆ ได้อีกมากมาย เมื่อสถานะการตรวจสอบของแต่ละรายการถึงค่าที่ตั้งค่าได้ตามต้องการ จะมีสัญญาณถูกส่งออกมา
ฟังก์ชันการตรวจสอบสามารถตรวจจับสภาพของอุปกรณ์และความผิดปกติในการขันสกรูที่อาจนำไปสู่ความล้มเหลวของผลิตภัณฑ์ตามการเปลี่ยนแปลงในตำแหน่ง แรงบิด เป็นต้น
นอกจากนี้ เนื่องจากสามารถติดตามการหมุนสะสมตั้งแต่เริ่มใช้งาน จึงช่วยในการทำให้ความรู้ที่ได้จากประสบการณ์เป็นที่มองเห็นได้ และช่วยในการบำรุงรักษาเชิงพยากรณ์ด้วย
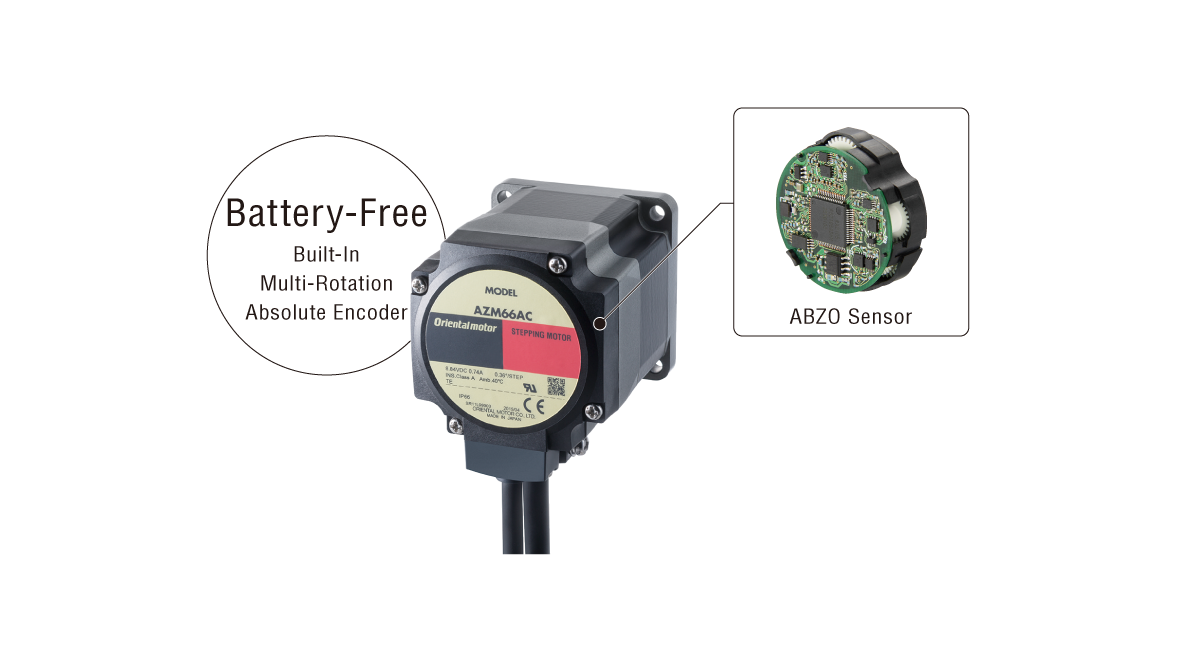
เอ็นโค้ดเดอร์แบบสัมบูรณ์ ไม่ต้องการเซ็นเซอร์ภายนอกหรือแบตเตอรี่
AZ ซีรีส์ มาพร้อมกับเซ็นเซอร์เอ็นโค้ดเดอร์แบบสัมบูรณ์ที่ไม่มีแบตเตอรี่ในตัว <เซ็นเซอร์ ABZO> ข้อมูลตำแหน่งจะถูกเก็บรักษาไว้แม้ว่าจะมีการตัดไฟเนื่องจากการหยุดฉุกเฉินหรือไฟฟ้าดับ หรือสายเคเบิลระหว่างมอเตอร์และไดรเวอร์ถูกตัดขณะดำเนินการตั้งตำแหน่ง
นอกจากนี้ เนื่องจากการตั้งค่าขีดจำกัดของบ้านและซอฟต์แวร์สามารถทำได้โดยใช้ข้อมูลตำแหน่งที่แน่นอน จึงไม่จำเป็นต้องใช้เซ็นเซอร์ภายนอก
คลิกที่นี่เพื่อข้อมูลเกี่ยวกับการเริ่มต้นใหม่หลังจากการตัดไฟ
บรรลุการเคลื่อนไหวที่หลากหลายด้วยการควบคุมแบบรวม
αSTEP Z ซีรีส์ มีผลิตภัณฑ์ประเภทมอเตอร์มาตรฐานขนาดเล็ก รวมถึงมอเตอร์ที่มีเบรกแม่เหล็กไฟฟ้า หัวเกียร์ และอื่นๆ อีกมากมาย โอเรียนทัล มอเตอร์ ก็กำลังพัฒนาผลิตภัณฑ์แอคชูเอเตอร์ที่รวมมอเตอร์และแอคชูเอเตอร์เข้าด้วยกันอยู่เช่นกัน การเดินสายไฟ การควบคุม และชิ้นส่วนการบำรุงรักษาได้ถูกทำให้เป็นมาตรฐาน เนื่องจากมอเตอร์ ตัวขับเคลื่อน สายเคเบิล ฯลฯ ต่างๆ เป็นสิ่งที่ใช้ร่วมกันในอุปกรณ์ ซึ่งช่วยลดเวลาและความพยายามที่จำเป็นสำหรับการเริ่มต้นใช้งาน

ผลิตภัณฑ์ที่ติดตั้งภายใน

αSTEP AZ ซีรี่ส์ ไดเวอร์ที่รองรับ EtherNet/IP™
ไดรเวอร์นี้เข้ากันได้กับ EtherNet/IP. มอเตอร์ซีรีส์ AZ ของ โอเรียนทัล มอเตอร์ สามารถเชื่อมต่อกับแอคทูเอเตอร์ไฟฟ้าที่รองรับได้ ทำให้สามารถนำไปใช้ในหลากหลายแอปพลิเคชัน
เอ็นโค้ดเดอร์แบบสัมบูรณ์แบบไม่มีแบตเตอรี่ ซีรีส์ αSTEP AZ
αSTEP ซึ่งใช้การควบคุมวงปิดที่เป็นเอกลักษณ์ของ โอเรียนทัล มอเตอร์ มาพร้อมกับเซ็นเซอร์ ABZO ที่พัฒนาขึ้นใหม่
ระบบที่สมบูรณ์แบบตอนนี้เป็นไปได้โดยไม่ต้องใช้แบตเตอรี่เลย มีไดรเวอร์ที่เข้ากันได้กับเครือข่ายหลากหลายประเภทให้เลือกใช้ เพื่อให้สามารถทำการจัดตำแหน่งขั้นสูงได้ในราคาที่เหมาะสม
การสนับสนุนการออกแบบอุปกรณ์ตั้งแต่ขั้นตอนการเลือกผลิตภัณฑ์
การสนับสนุนสำหรับการเลือกมอเตอร์
เรามี "เครื่องมือคำนวณขนาดมอเตอร์" ที่ช่วยให้คุณสามารถเลือกมอเตอร์ได้บนคอมพิวเตอร์ของคุณ
โอเรียนทัล มอเตอร์ ยังมีบริการที่พนักงานของเรา จะคัดเลือกมอเตอร์ให้กับลูกค้าอีกด้วย กรุณาอ้างอิงจากลิงก์สำหรับรายละเอียดเพิ่มเติม
-
สำหรับเครื่องมือคำนวณขนาดมอเตอร์ คลิกที่นี่
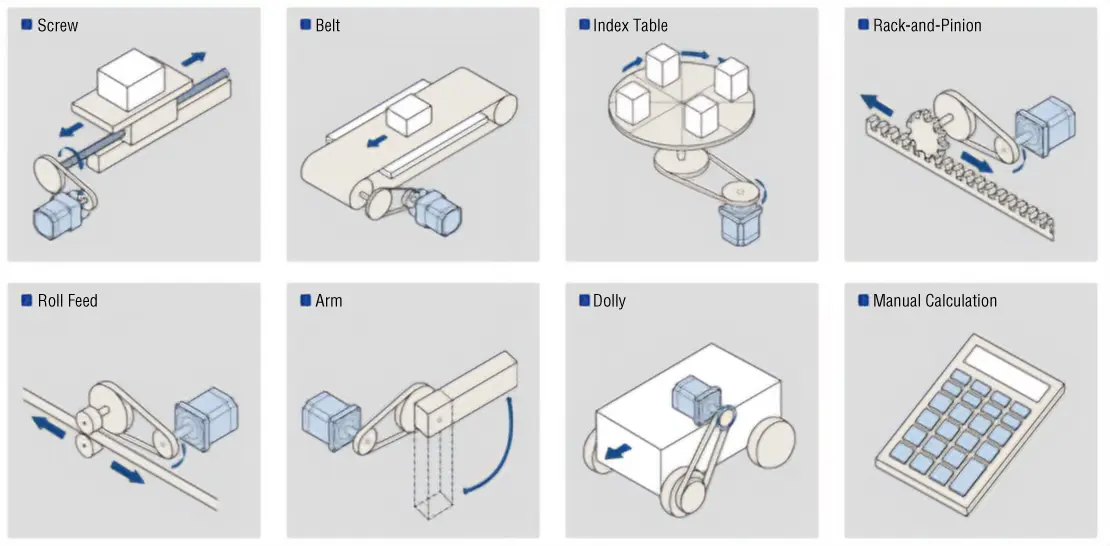
< รูปภาพเครื่องมือคำนวณขนาดมอเตอร์ >
เอกสารเกี่ยวกับอุปกรณ์มีให้บริการแล้ว
เอกสารที่เกี่ยวข้องกับข้อกำหนดของอุปกรณ์ ขนาดภายนอก และรูปแบบการทำงานมีให้บริการแล้ว กรุณาใช้ข้อมูลนี้เมื่อพิจารณาอุปกรณ์ที่คล้ายกัน

เอกสารเริ่มต้นสำหรับผลิตภัณฑ์ของ โอเรียนทัล มอเตอร์ และ PLCs มีให้บริการแล้ว
มีคู่มือการติดตั้งที่อธิบายกระบวนการจนถึงการเชื่อมต่อกับ PLC และการใช้งานอย่างง่ายให้บริการ กรุณาใช้มันเพื่อลดเวลาเริ่มต้นของคุณ
[ผู้ผลิตที่เกี่ยวข้อง]
- OMRON Corporation,
- KEYENCE Corporation,
- Hitachi Industrial Equipment Systems Co., Ltd.,
- Fuji Electric Co., Ltd.,
- Mitsubishi Electric Corporation,
- YASKAWA Electric Corporation,
- Siemens K.K.

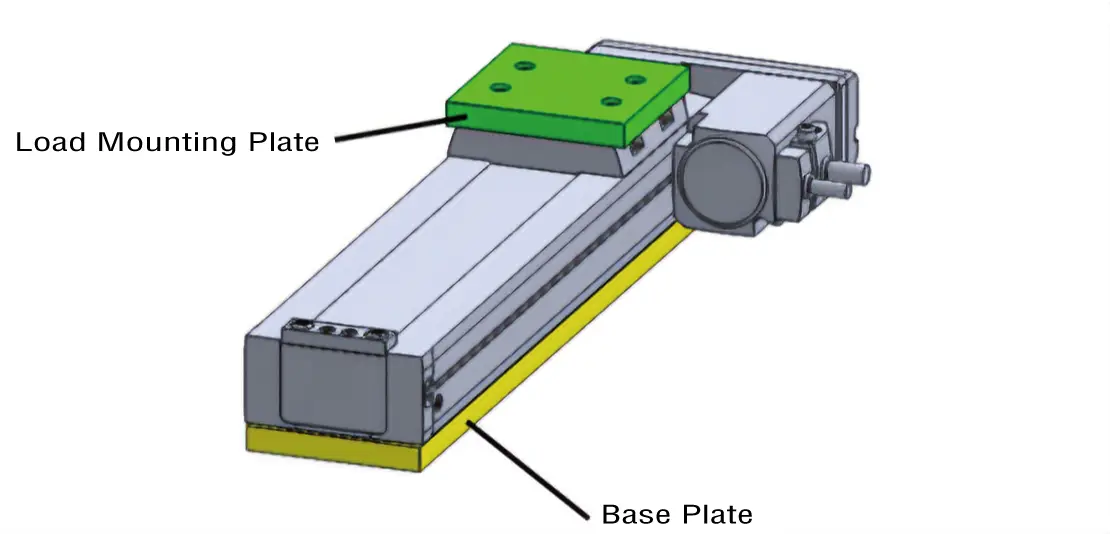
ข้อมูล CAD ตัวอย่างพร้อมให้บริการ
ข้อมูล CAD ตัวอย่างของแผ่นขอบที่ใช้สำหรับติดตั้งแอคชูเอเตอร์ไฟฟ้าสามารถดาวน์โหลดได้จากเว็บไซต์นี้ เราหวังว่าข้อมูลนี้จะเป็นประโยชน์ในการออกแบบอุปกรณ์และพิจารณาผลิตภัณฑ์
มีเครื่องมือสำหรับคำนวณเวลาการจัดตำแหน่งที่สั้นที่สุดให้ใช้งานแล้ว
คุณสามารถคำนวณเวลาการตั้งตำแหน่งอ้างอิงตาม "โมเดล" และ "สภาพการทำงาน" ได้ กรุณาใช้มันเป็นเครื่องมือสนับสนุนเมื่อเลือกผลิตภัณฑ์

เมื่อมีปัญหา เราจะแก้ไขให้โดยวิศวกรผู้เชี่ยวชาญ
บริการของ โอเรียนทัล มอเตอร์ วิศวกรจะไปเยี่ยมชมสถานที่ของลูกค้าเพื่อตอบคำถามและปัญหาต่างๆ ที่เกี่ยวข้องกับมอเตอร์
โอเรียนทัล มอเตอร์ ยังมีการสนับสนุนออนไลน์ด้วย ดังนั้นโปรดอย่าลังเลที่จะใช้บริการนี้
Related Content

Wide-Ranging Support for In-House Production of Robots
Selection points and related services for those who are considering in-house robot production will be introduced, based on an actual vertical articulated robot demonstration machine.
Load Transportation Equipment
This is equipment that transports loads in a similar motion to a SCARA robot. The load is grasped, swiveled, and transferred to the point at a different height.

Multi-Product Parts Feeder
This equipment supplies parts of various sizes one by one like a parts feeder. The specified parts are cut out from the stocker by a rack-and-pinion mechanism and transported to the feed port.
Load Elevating and Lowering Equipment
This is elevating and lowering equipment for passing loads between conveyors of different heights. The trays are circulated at both ends of the conveyors arranged in the upper and lower levels.

Load Processing Equipment
This equipment automatically applies liquids to loads. Loads are elevated and swiveled by the elevating/lowering and swiveling unit to match the processing position, and the cartesian robot (gantry unit) processes loads of various sizes and shapes.

AGV
This equipment is a conveyor mounted on top of an AGV (transportation cart). This equipment automates the transportation process that was previously performed manually. AGVs reduce the number of fixed conveyors and contribute to labor savings.
SCARA Robot (Horizontal articulated robot)
This is an in-house production (self-made) SCARA robot that automates pick-and-place operation and inter-process transportation of loads. The robot is used on a line that automates gluing, measuring, and assembly, which were previously performed manually by humans.

4-Axis Articulated Robot Arm
This robot arm is equipped with the AZ Series. The parallel link mechanism keeps the tip horizontal without controlling the wrist axis. (This will take you to the Orim Vexta website.)